Eine Einführung in Roboter
Roboter ist eine Maschine, die wie Menschen aussieht. Das wurde programmiert, um etwas zu tun. Das Wort Roboter kommt vom slawischen Wort robota (Zwangsarbeiter). Der Roboter wurde in den 1960er Jahren entwickelt. Roboter bestehen aus Metallen und Mischer aus anderen Elementen. Roboter befehlen nur und was Menschen sagen. Vor dreißig Jahren waren Roboter etwas in einem Science-Fiction-Film. Heute wird Robotik in vielen Bereichen eingesetzt. Und es ist sehr wichtig für die Zukunft der Menschheit. Das Robotertechnologien verbessern die Unterstützung der Landesverteidigung, des Gesundheitswesens, des verarbeitenden Gewerbes, der inneren Sicherheit, der Bildung, der Konsumgüter und vieler verschiedener Sektoren. Bereits jetzt setzen Ärzte Robotik in Spezialoperationen ein. Roboter sind wichtig, weil sie Aufgaben ausführen, die auch für Menschen gefährlich und unmöglich sind.
5 Gründe, warum Roboter beliebt waren
- Geschwindigkeit
- Gefährliche Umgebungen
- Wiederkehrende Aufgaben
- Effizienz
- Richtigkeit
Geschwindigkeit:
Roboter können verwendet werden, weil sie Aufgaben schneller ausführen als Menschen. Roboter ist wirklich ein Mechanismus, der von einem Computer gesteuert wird. Wir wissen, dass Computer Daten im Vergleich zu Menschen sehr schnell berechnen und verarbeiten können. Einige Roboter bewegen sich tatsächlich schneller und erledigen Aufgaben wie das Aufnehmen und Einsetzen von Gegenständen schneller als Menschen.
Gefährliche Umgebungen:
Roboter können in gefährlichen Umgebungen eingesetzt werden, da sie an Orten arbeiten können, an denen ein Mensch in Gefahr wäre. Zum Beispiel kann ein Roboter so konstruiert werden, dass er mehr Wärme, Strahlung und chemischen Dämpfen standhält als Menschen.
Wiederkehrende Aufgaben:
Manchmal sind Roboter nicht viel schneller als Menschen, aber sie können einfach immer wieder den gleichen Job machen. Dies ist für den Roboter einfach, da, sobald der Roboter so programmiert wurde, dass er einen Job einmal ausführt, dasselbe Programm viele Male ausgeführt werden kann, um den Job viele Male auszuführen. Und der Roboter wird sich nicht langweilen wie ein Mensch.
Effizienz:
Bei Effizienz geht es darum, Aufgaben ohne Abfall auszuführen. Diese Durchschnitts
- Keine Zeit verschwenden
- Keine Materialien verschwenden
- Keine Energie verschwenden
Richtigkeit:
Bei der Genauigkeit geht es darum, Aufgaben sehr präzise auszuführen. In einer Fabrik, in der Artikel hergestellt werden, muss jeder Artikel identisch hergestellt werden. Wenn Gegenstände zusammengebaut werden, kann ein Roboter Teile innerhalb eines Bruchteils eines Millimeters positionieren.
Einen Roboter steuern
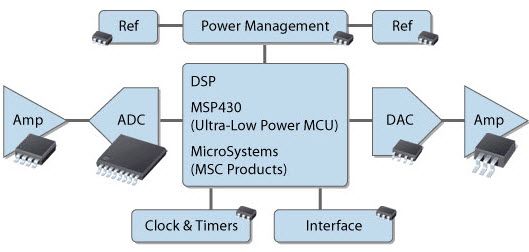
Ein Basisroboter oder ein Robotersystem besteht aus einem starren Körper, der die gesamte Schaltung des Roboters beherbergt. Die Schaltung besteht aus Sensoren, die Änderungen in der Umgebung erfassen und diese Informationen an die Steuereinheit weiterleiten.
Basierend auf der Eingabe von den Sensoren steuert die Steuereinheit die Aktuatoren entsprechend. Somit liegt der Hauptbetrieb des Roboters bei der Steuereinheit. In einigen Anwendungen ist der Roboter vollautomatisch, d. H. Die Steuerung liegt in der Vorrichtung selbst und basierend auf einer Sensoreinheit werden die Aktuatoren automatisch von der Steuereinheit gesteuert. In einigen Anwendungen wird der Roboter manuell gesteuert.
Lassen Sie uns zwei Möglichkeiten sehen, einen Roboter manuell zu steuern
- Mit einem Handy
- Verwenden einer TV-Fernbedienung
Handygesteuertes Roboterfahrzeug:
Wenn wir darüber reden drahtlose Roboterfahrzeuge Wir denken im Allgemeinen über HF-Technologie-Schaltungen nach. Aber dieses Projekt ist ganz anders. Es verwendet ein Mobiltelefon, um die Bewegung des Roboterfahrzeugs zu steuern. Hier haben wir die DTMF-Technologie verwendet, um das Roboterfahrzeug mithilfe des Mobiltelefons zu steuern. Wir haben zwei Handys benutzt, eines ist mit dem Roboter verbunden und eines ist das Benutzertelefon. Die Kommunikation zwischen diesen beiden Mobiltelefonen wird hergestellt, und wenn eine Taste gedrückt wird, ist dieser Ton an einem anderen Ende der Zelle zu hören. Dieser Ton wird als 'Dual Tone Multi Frequency' -Ton (DTMF) bezeichnet.

Handygesteuertes Roboterfahrzeug

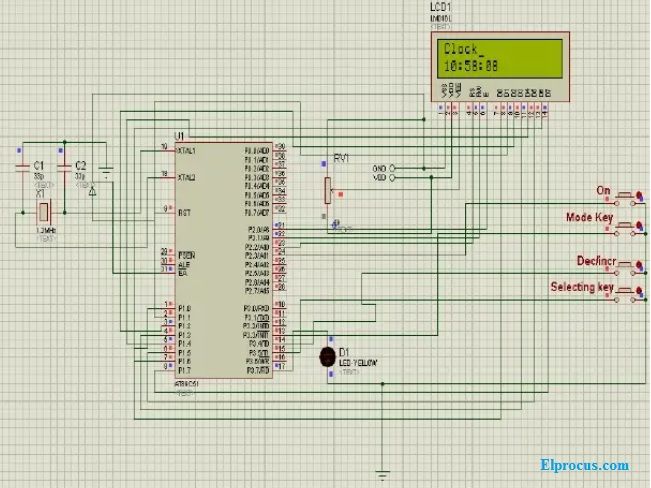
Handygesteuerter Schaltplan für Roboterfahrzeuge
Dieses Projekt soll ein Roboterfahrzeug das wird vom Handy gesteuert. Dies basiert auf einem 8051-Mikrocontroller. Die beiden Handys steuern den Roboter nach Bedarf. Ein Mobiltelefon ist mit dem Roboter verbunden und ein anderes ist eine Benutzerzelle. Wenn eine Taste auf dem Benutzerhandy diese Taste drückt, wird sie in einer anderen Zelle empfangen. Der empfangene Ton wird vom Mikrocontroller mit Hilfe des DTMF-Decoders verarbeitet. Der Decoder decodiert den DTMF-Ton in Binärziffern und diese binär codierten Daten werden an den Mikrocontroller gesendet. Basierend auf der Eingabe vom Mobiltelefon gibt der Mikrocontroller dem Motortreiber dementsprechend geeignete Signale, um jeden Motor in die gewünschte Richtung zu drehen. Wenn Sie beispielsweise eine bestimmte Nummer auf dem Benutzerhandy drücken, wird der Anruf automatisch auf das Systemhandy gewählt. Das Systemmobil ist mit dem DTMF-Decoder verbunden, der dementsprechend den Ton decodiert, und der Motor wird in die Richtung gedreht, die der gedrückten Nummer entspricht.
IR-gesteuertes Roboterfahrzeug:
In diesem System wird hauptsächlich ein Roboterfahrzeug von der TV-Fernbedienung gesteuert. Der Infrarotsensor (IR) ist mit der Robotersteuereinheit verbunden, um das Fernsignal zu erfassen. Diese Informationen werden an die Steuereinheit weitergeleitet, die den Roboter gemäß den Anforderungen bewegt. Ein Mikrocontroller wird als Steuerungssystem verwendet.
In dieser IR-Fernbedienung geht es um einen Sender. An dem Punkt, an dem die Taste in der Fernbedienung gedrückt wird, wird das Signal vom IR-Empfänger weitergeleitet und empfangen. Dieses Zeichen wird an den Mikrocontroller gesendet, der das Signal decodiert und die entsprechende Bewegung gemäß der auf der Fernbedienung gedrückten Taste ausführt. Wenn beispielsweise Nummer 1 in der Fernbedienung gedrückt wird, wird der Roboter gemäß unserer Anforderung nach links gedreht. Der andere Unternehmenstest (vorwärts, rückwärts und rechts) wird auf vergleichende Weise unter Verwendung von IR durchgeführt. Am Empfangsende wird die Entwicklung durch zwei Motoren erreicht, die mit dem Mikrocontroller verbunden sind.
Das Programm wird geschrieben, d. H., Während es ausgeführt wird, sendet es Befehle an den Motortreiber-IC gemäß seiner Anforderung zum Laufenlassen des Motors für die Bewegung des Roboters, wie oben erläutert.

IR-gesteuertes Blockdiagramm für Roboterfahrzeuge
Wenn Sie Zweifel an diesem Artikel haben, hinterlassen Sie bitte einen Kommentar. Und lassen Sie mich mehr Anwendung und Methoden im Zusammenhang damit wissen?