
Ein Universalmotor ist ein in Reihe gewickelter Elektromotor, der sowohl mit Wechsel- als auch mit Gleichstrom betrieben werden kann. Diese sind im Vergleich zu Gleichstrommotoren sehr viel, aber der Reihenmotor entwickelt beim Arbeiten mit einer Wechselstromversorgung weniger Drehmoment als bei Arbeiten mit einer äquivalenten Gleichstromversorgung. Die Drehrichtung kann durch Vertauschen der Verbindungen zum Ankerfeld wie beim Gleichstrommotor geändert werden.
Die Arbeitsweise eines Universalmotors ähnelt einer Serie Gleichspannungs Motor . Andererseits ist der Universalmotor für den Wechselstrombetrieb ausgelegt. Es ist kompetent, entweder bei AC oder DC zu arbeiten. Auf diese Weise ist seine Entwicklung ein wenig ausgeprägt. Die Feldwicklung und die Ankerwicklung sind in Reihe geschaltet. Beide Wicklungen werden erregt, wenn Spannung an den Motor angelegt wird. Die Feld- und Ankerwicklungen erzeugen ein Magnetfeld, das bewirkt, dass sich der Anker dreht. Bescheidene Universalmotoren haben normalerweise keine Vergütung und Ersatzwicklung, sie haben zwei ausgeprägte Pole mit Erregerwicklung. Die Reaktion zwischen Magnetfeldern wird entweder durch Wechsel- oder Gleichstrom verursacht.

Universalmotor
Der Universalmotor erzeugt das elektrische Drehmoment proportional zum Quadrat des Versorgungsstroms. Da der gleiche Strom durch die Feldwicklung und den Anker fließt, folgt, dass Wechselstromumkehrungen von positiv nach negativ oder von negativ nach positiv gleichzeitig sowohl die Feldflusspolarität als auch die Stromrichtung durch den Anker beeinflussen. Dies bedeutet, dass die Richtung des entwickelten Drehmoments positiv bleibt und die Drehung in die gleiche Richtung fortgesetzt wird. Somit kann ein Universalmotor sowohl mit Gleichstrom als auch mit Wechselstrom betrieben werden. Das elektrische Drehmoment hat also bei jeder Strompolarität und auch bei Wechselstrom die gleiche Drehmomentrichtung. Das Anlaufdrehmoment eines Universalmotors wird durch den Strom bestimmt, der durch den Anker und die Feldwicklungen fließt. Aufgrund der induktiven Reaktanz dieser Wicklungen ist der Wechselstrom-Anlaufstrom immer geringer als der Gleichstrom-Anlaufstrom . Folglich ist das Startdrehmoment bei Wechselstrom niedriger als das Startdrehmoment bei Gleichstrom. Die Eigenschaften des Universalmotors sind denen von Gleichstrommotoren sehr ähnlich, aber der Reihenmotor entwickelt weniger Drehmoment, wenn er mit einer Wechselstromversorgung betrieben wird, als wenn er mit einer äquivalenten Gleichstromversorgung arbeitet.
Es gibt verschiedene Anwendungen, bei denen Universalmotoren verwendet werden, wie Bohrmaschinen, Waschmaschinen, Gebläse und Küchengeräte usw. Und sie werden auch für zahlreiche verschiedene Zwecke verwendet, bei denen Geschwindigkeitsregelung und hohe Geschwindigkeitsqualitäten erforderlich sind. Wir können Universalmotoren auch in weniger als 1000 Watt finden. Universalmotoren mit einer bestimmten Leistung sind erheblich kleiner als andere Arten von Wechselstrommotoren, die mit derselben Frequenz arbeiten.
Die Drehzahlregelung von Universalmotoren kann auf folgende Weise erfolgen
- Phasenwinkelsteuerung
- PWM-Chopper-Steuerung
Bei der Phasenwinkelregelungsmethode wird die Geschwindigkeitsregelung durch Variieren des Zündwinkels für den TRIAC erreicht. Die Phasenwinkelsteuerung ist eine sehr kostengünstige Lösung, aber nicht sehr effizient. Bei der PWM-Methode wird die gleichgerichtete Netzwechselspannung von einem Leistungs-MOSFET- oder IGBT-Bauelement auf eine hohe Frequenz geschaltet, um eine zeitlich veränderliche Spannung für den Motor zu erzeugen. Bei diesem Verfahren sind zur Steuerung der Motoren durch Bereitstellung einer stabilen Drehzahlregelung, zur Verhinderung großer Ströme und zur Entnahme eines minimalen Oberschwingungsstroms aus der Wechselstromversorgung erforderlich. Um diese Anforderungen zu erfüllen, wird die Verwendung eines Wechselstrom-Zerhackers mit Strom- und Geschwindigkeitsrückmeldung bevorzugt.
Der AC-Universalmotorantrieb steuert die Drehzahl durch Phasenwinkelpartialisierung. Diese Methode besteht darin, die an den Motor angelegte Effektivspannung zu ändern. In diesem Fall ist die Spannung eine Funktion des Zündwinkels des Triac. Die kontinuierliche Drehzahlregelung eines Universalmotors, der mit Gleichstrom betrieben wird, ist mit a Thyristorschaltung . Ein Thyristor versorgt den Motor während der positiven Netzhalbwelle. Sowohl der Thyristor als auch seine Steuerung sind so angeschlossen, dass die Motor-Gegen-EMK die Motorlastschwankungen kompensiert, um die Drehzahl einzustellen. Die PWM-Technik (Pulsweitenmodulation), auch als Chopper-Antrieb bekannt, wird zum Einstellen der an den Motor angelegten Spannung verwendet. Mit der Änderung des PWM-Arbeitszyklus kann die vom Motor gesehene effektive Spannung geändert werden. Der Vorteil der PWM-Modulation hinsichtlich der Phasenwinkelpartialisierung ist ein höherer Wirkungsgrad, weniger akustisches Rauschen und ein besseres EMV-Verhalten, kann sich jedoch auf die Lebensdauer der Bürste auswirken.
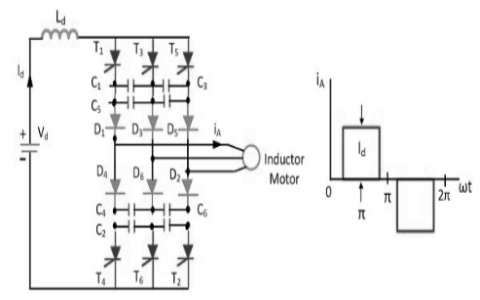
In der folgenden Anwendung sind die Feld- und Ankerwicklungen des Motors über den Ankerkommutator in Reihe geschaltet. Daher ist der Universalmotor auch als AC-Serienmotor oder AC-Kommutatormotor bekannt. Der Universalmotor kann entweder als Phasenwinkelantrieb gesteuert werden. In dieser Anwendung haben wir die Phasenwinkelsteuerungstechnik verwendet, um die an den Motor angelegte Spannung zu steuern. Durch eine Phasenverschiebung der Gate-Impulse kann die vom Motor gesehene effektive Spannung variiert werden. Der Phasenwinkelantrieb benötigt nur einen TRIAC. Diese gehören zur Thyristorfamilie und sind eng mit siliziumgesteuerten Gleichrichtern verwandt. Im Gegensatz zu SCRs, bei denen es sich um unidirektionale Geräte handelt, die Strom nur in eine Richtung leiten können, sind TRIACs bidirektional und können daher in beide Richtungen fließen. Diese treten häufiger in Schaltkreisen wie Motorantrieben auf. TRIACs werden normalerweise in einfachen Anwendungen mit geringem Stromverbrauch wie Haushaltsdimmerschaltern verwendet.
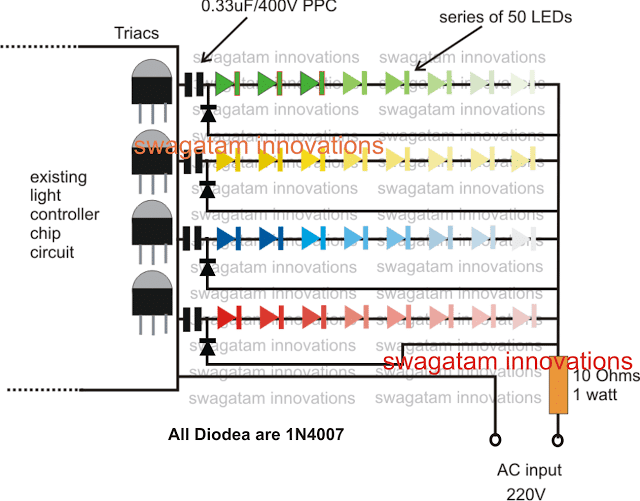
MOC3021 ist ein Optokoppler. Ein Optokoppler verbindet die Eingangs- und Ausgangsseite mit einem durch den Eingangsstrom modulierten Lichtstrahl. Es wandelt nützliches Eingangssignal in Licht um, sendet es über den dielektrischen Kanal, fängt Licht auf der Ausgangsseite ein und wandelt es wieder in elektrisches Signal um. Diese werden normalerweise in einem kleinen 6-poligen oder 8-poligen IC-Gehäuse geliefert, sind jedoch im Wesentlichen eine Kombination von zwei verschiedenen Vorrichtungen ein optischer Sender, typischerweise eine Galliumarsenid-LED und ein optischer Empfänger wie ein Fototransistor oder ein lichtgetriggerter Diac. Die beiden sind durch eine transparente Barriere getrennt, die jeglichen elektrischen Stromfluss zwischen den beiden blockiert, aber den Durchgang von Licht ermöglicht. Die MOC3020-Serie besteht aus Galliumarsenid-Infrarot-Emissionsdioden, die optisch mit einem bilateralen Siliziumschalter gekoppelt sind. Sie sind für Anwendungen konzipiert, die eine isolierte Triac-Triggerung erfordern.
Jetzt haben Sie eine Vorstellung von den Universalmotoren, wenn Sie weitere Fragen zu diesem Thema oder den elektrischen und elektronische Projekte Hinterlasse den Kommentarbereich unten.
Universal Motor Based Projects
Fotokredit
- Universalmotor von o-digital









{kind=link}