Was ist Deadlock im Betriebssystem: Bedingungen & Erkennungsalgorithmus
In diesem Artikel werden die Bedingungen in einem Betriebssystem, die zur Erkennung der Deadlock-Bedingung verwendeten Algorithmen sowie ihre Vor- und Nachteile beschrieben.
Beliebte Beiträge
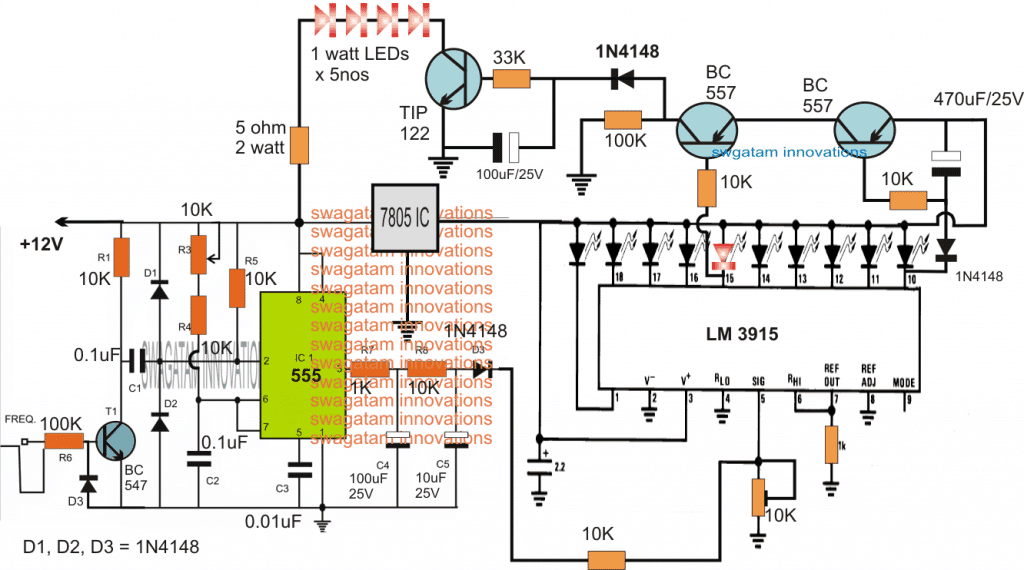
Geschwindigkeitsabhängiger Bremslichtkreis
Der Beitrag erklärt eine innovative Bremslichtschaltung unter Verwendung der Geschwindigkeitserkennung des Fahrzeugs, bei dem es sich um ein Motorrad handeln könnte. Die Schaltung implementiert einen erweiterten Bremslichtschalter, der sicherstellt, dass a

Wasserstandsregler
Kontrolle des Wasserstandes in Tanks für Privathaushalte und öffentliche Räume mit Sonden in Kontakt mit Wasser oder einem berührungslosen Ultraschallsensor, digital

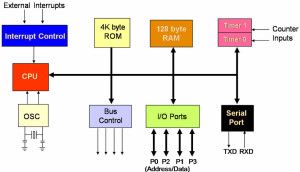
Was ist der Unterschied zwischen RISC- und CISC-Architektur?
In diesem Artikel wird der Unterschied zwischen RISC- und CISC-Architektur, die unterschiedlichen Konzepte, Vorteile, Nachteile und Anwendungen erläutert.
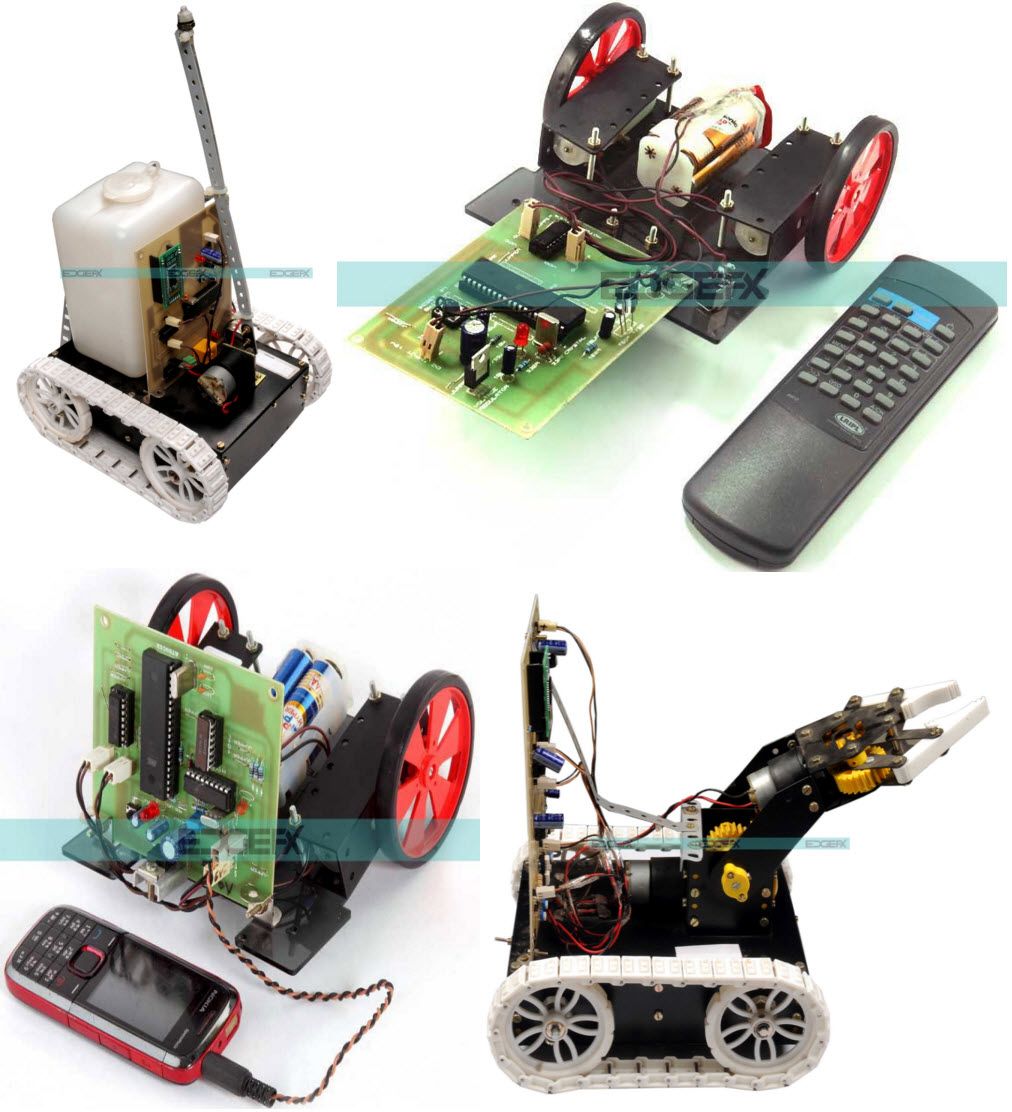
Schnurverfolgendes Roboterfahrzeug mit Geh- und Klettermechanismus
Das fortschrittliche Roboterprojekt, das sich bewegt, indem es einem bestimmten Pfad folgt, der als Linienfolger-Roboter bezeichnet wird. Linienverfolgungsroboter erweiterbar mit Geh- und Klettermechanismus.