Der Beitrag erklärt ein einfaches Hindernis zur Vermeidung von Roboterschaltungen ohne Mikrocontroller und ohne Verwendung spezieller Motortreiberschaltungen oder ICs. Die Idee wurde von Herrn Faiyyaz angefordert
Das Design
Grundsätzlich ist es in Form eines fahrendes Fahrzeug das in der Lage ist, potenzielle Hindernisse auf seinem Weg zu erkennen und zu vermeiden und seine Richtung entsprechend zu ändern, so dass seine Bewegung ununterbrochen bleibt, einfach!
Der Betrieb erfolgt somit automatisch ohne manuellen oder menschlichen Eingriff.
Die vorgestellte Idee eines Roboters zur Vermeidung von Hindernissen ohne Mikrocontroller, wie der Name schon sagt, verwendet keinen Mikrocontroller und ist daher äußerst einfach zu bauen und für jeden neuen Bastler geeignet.
Beim Entwerfen der Schaltung wurde mir klar, dass zur Umsetzung des Prinzips mindestens einige Hindernisse erforderlich sind, da die Verwendung eines einzelnen Moduls zu einer unregelmäßigen Bewegung des Motors führen kann und möglicherweise nicht zu einer reibungslosen Umleitung oder Drehung des Fahrzeugs in Richtung führt ein freier Weg.
Der Aufbau des Fahrzeugmotors ist dem sehr ähnlich ferngesteuertes Spielzeugauto was ich in einem der früheren Beiträge besprochen hatte.
Das folgende Diagramm stellt eines der Module des Systems dar, und daher wären zwei oder ein Paar solcher Module auf der rechten und der linken Seite des Fahrzeugs erforderlich.
Die Idee ist einfach und funktioniert ohne Mikrocontroller und ohne spezielle Motortreiber-ICs. Das heißt, Sie können es ohne jegliche Codierung und ohne Verwendung eines komplexen Motortreiber-ICs herstellen ..... und die Schaltung ermöglicht es Ihnen, jeden Gleichstrommotor unabhängig von seiner Leistung zu verwenden, so dass selbst Fahrzeuge mit hoher Leistung Hindernisse vermeiden können hergestellt unter Verwendung dieser Schaltung, die normalerweise in Einkaufszentren und ähnlichen Einzelhandelsgeschäften verwendet werden.
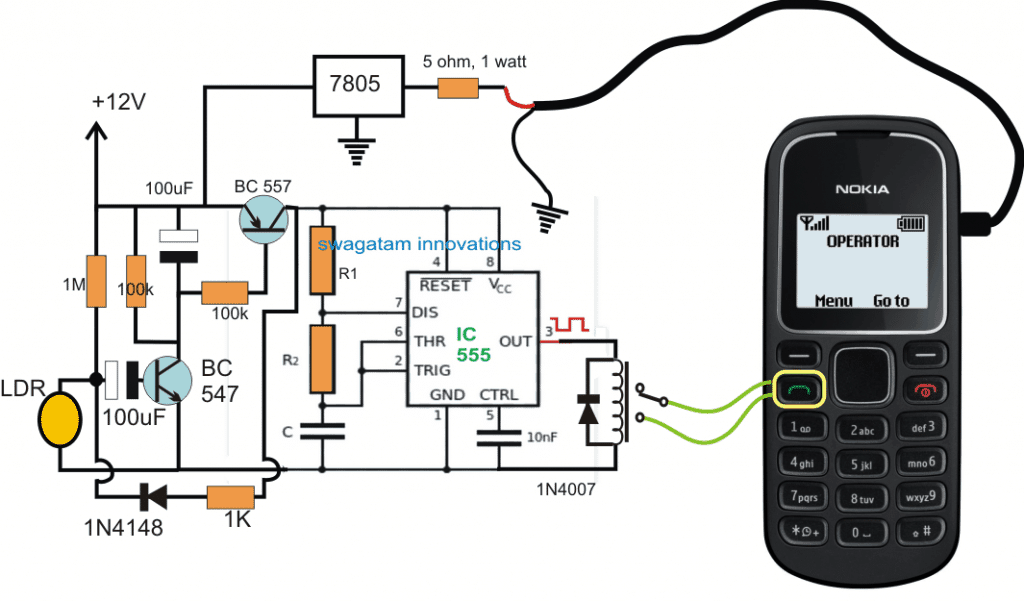
Schaltplan

Versuchen wir nun, die obige Schaltung mit Hilfe der folgenden Erklärung zu verstehen:
Wie es funktioniert
Der IC 555 ist als IR-Sender konfiguriert und so eingestellt, dass er eine konstante Frequenz von 38 kHz erzeugt, während die angrenzende Transistorschaltung als Empfängerstufe oder IR-Sensorstufe konfiguriert ist.
Nehmen wir an, es ist das Modul auf der rechten Seite, und nehmen wir an, dass dieses Modul als erstes ein Hindernis auf dem Weg erkennt.
Sobald ein Hindernis erkannt wird, wird daher die vom 555 IC erzeugte 38-kHz-Frequenz zum Sensor der angrenzenden Empfängerschaltung reflektiert.
Der Empfänger aktiviert sofort die zugehörigen Transistoren, so dass der endgültige Treibertransistor nicht mehr leitbar ist.
Nun soll sich der Motor, der von diesem Transistor gesteuert wird, auf der linken Seite des Fahrzeugs befinden, dh auf der gegenüberliegenden Seite dieses Moduls. Ebenso wird der Motor auf der rechten Seite tatsächlich vom linken Modul gesteuert .
Wenn das oben angenommene Hindernisdetektormodul auf der rechten Seite aktiviert wird, stoppt es folglich den Motor auf der linken Seite, während sich der Motor auf der rechten Seite normal bewegen kann.
Diese Situation führt dazu, dass das Fahrzeug gezwungen ist, eine Umleitung auf der linken Seite vorzunehmen ... was bedeutet, dass das angenommene linke Modul jetzt noch stärkere Hindernissignale erhält und das Fahrzeug gezwungen ist, die laufende Umleitung härter fortzusetzen, bis es das Hindernis vollständig umgangen hat . Das Modul empfängt nun keine Hindernissignale mehr und das Fahrzeug fährt auf seinem neuen Weg normal weiter.
Während die obige Umleitung durchgeführt wird, wird das Modul auf der linken Seite gezwungen, immer isolierter und vom Hindernis weg zu werden, so dass es keine Gelegenheit bekommt, sich in den Vorgang einzumischen und eine saubere und reibungslose Umleitung des Fahrzeugs zu ermöglichen.
Genau die gleichen Verfahren werden implementiert, falls das linke Modul das Hindernis vor dem rechten Modul erfasst, wobei das Fahrzeug gezwungen ist, sich immer härter zur rechten Seite zu bewegen.
Wir können auch eine 'Deaktivierungs' -Schaltungsstufe im Modul sehen, die über das linke und das rechte Modul miteinander verbunden sind. Diese Phase wird absichtlich eingeführt, um sicherzustellen, dass beide Module niemals zusammen aktiviert werden.
Wenn beispielsweise das linke Modul als erstes ein Hindernis erkennt, deaktiviert es sofort das rechte Modul und leitet die Umleitung des Fahrzeugs auf der rechten Seite ein und umgekehrt.
Der Sensor-IC könnte ein Standard TSOP17XX Serie
Weitere Informationen zum oben genannten Sensor-IC finden Sie hier So schließen Sie den TSOP1738 IC an
Und der Motor sollte mit Getrieben ausgestattet sein, damit die Bewegung ursprünglich auf einem kontrollierten Niveau gehalten wird.
Rad einrichten
Der vollständige Aufbau des linken und rechten Moduls und der zugehörigen elektrischen Verbindungen ist in der folgenden Abbildung dargestellt:

Aktualisieren
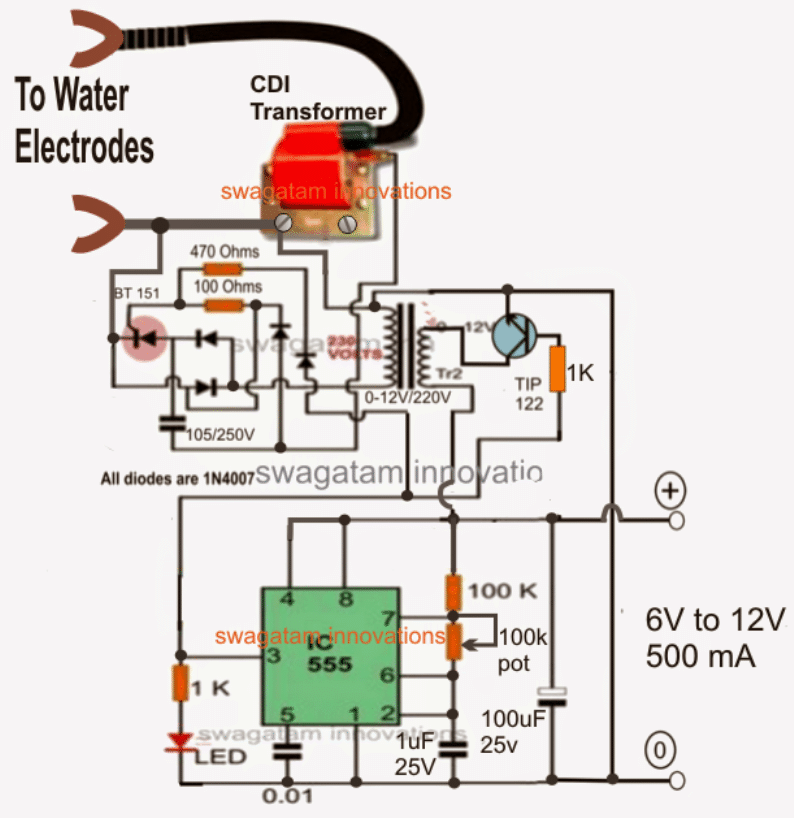
Ein wenig Nachdenken sagt uns, dass das obige einfache Hindernis zur Vermeidung von Roboterschaltungen auch durch die Verwendung eines einzelnen Moduls anstelle der beiden implementiert werden könnte.
Ein einziges Modul würde es dem Fahrzeug jedoch ermöglichen, jedes Mal, wenn es ein Hindernis erkennt, eine einseitige Umleitung durchzuführen. Daher könnte das System so konfiguriert werden, dass es entweder eine Umleitung im Uhrzeigersinn oder gegen den Uhrzeigersinn vornimmt, je nachdem, welcher Motor für die Aktionen mit dem Stromkreis verbunden ist.
Das Beispiel kann in der folgenden Abbildung dargestellt werden:

Es scheint jedoch ein Problem mit dem oben genannten Einzelmotor-Setup zu geben. Angenommen, das Fahrzeug stößt auf der linken Seite auf eine rechtwinklige Ecke. Dies zwingt das Fahrzeug, sich gegen den Uhrzeigersinn weiter zu bewegen, bis es eine Kehrtwende macht, und beginnt, sich in die gleiche Richtung zurück zu bewegen, aus der es gestartet wurde. Dies würde der Benutzer nicht schätzen.
Zurück: SMD-Widerstände - Einführung und Arbeitsweise Weiter: Wie ein Beschleunigungsmesser funktioniert