
Beim Rechnen kann die CAN-Schnittstelle eine gemeinsame Grenze zwischen den beiden getrennten Teilen einer Systemkonversationsinformation sein. Das Gespräch kann zwischen Computerhardware, -software, Menschen, Peripheriegeräten und Kombinationen davon geführt werden. Einige Hardwaregeräte eines Computers mögen da einen Touchscreen Ein Touchscreen kann Informationen teilen und empfangen über die Schnittstelle, während andere Geräte wie ein Mikrofon, Maus nur eine Möglichkeit sind. Es gibt hauptsächlich zwei Arten von Schnittstellen wie Hardware-Schnittstelle und Software-Schnittstelle. Hardwareschnittstellen werden in vielen Geräten wie Eingabe-, Ausgabegeräten, Bussen und Speichergeräten verwendet. Diese CAN-Schnittstelle kann durch die Logiksignale definiert werden. Eine Softwareschnittstelle kann in einem breiten Spektrum auf verschiedenen Ebenen verfügbar sein. Ein Betriebssystem kann mit verschiedenen Teilen der Hardware verbunden sein. Die Programme oder Anwendungen auf der Das Betriebssystem muss möglicherweise kommunizieren Durch Streams und in der objektorientierten Programmierung müssen Objekte in jeder Anwendung über Methoden kommunizieren.

CAN BUS
Der CAN-Bus wurde im Jahr 1983 bei der Robert Bosch GmbH entwickelt. Dieses Protokoll wurde im Jahr 1986 auf dem SAE-Kongress (Society of Automobile Engineers) in Detroit, Michigan, veröffentlicht. Der erste CAN-Protokoll wurde von Philips und Intel hergestellt und im Jahr 1987 auf den Markt gebracht. Die BMW Serie 8 war jedoch das erste Fahrzeug, das über ein auf dem CAN-Protokoll basierendes Multiplex-Verkabelungssystem verfügte.

CAN BUS
Die vollständige Form der CAN ist ein Controller Area Network . Es ist eine Art von Fahrzeugbus, der hauptsächlich für verschiedene Zwecke ausgelegt ist Geräte und Mikrocontroller ohne Host-Computer miteinander zu interagieren. Dieses Protokoll basiert auf einer Nachricht und ist hauptsächlich für die elektrische Verkabelung in Kraftfahrzeugen konzipiert. Bosch veröffentlichte verschiedene Versionen des CAN und im Jahr 1991 wurde der neueste CAN 2.0 veröffentlicht.
CAN besteht hauptsächlich aus zwei Teilen, wie z. B. Teil A und Teil B, wobei Teil A eine 11-Bit-Kennung ist und im Standardformat vorliegt. Teil B ist eine 29-Bit-Kennung und liegt im erweiterten Format vor. Ein CAN, der 11-Bit-Bezeichner verwendet, wird als AN 2.0A bezeichnet, und ein CAN, der 29-Bit-Bezeichner verwendet, wird als CAN 2.0B bezeichnet
Schnittstelle von CAN zu USB
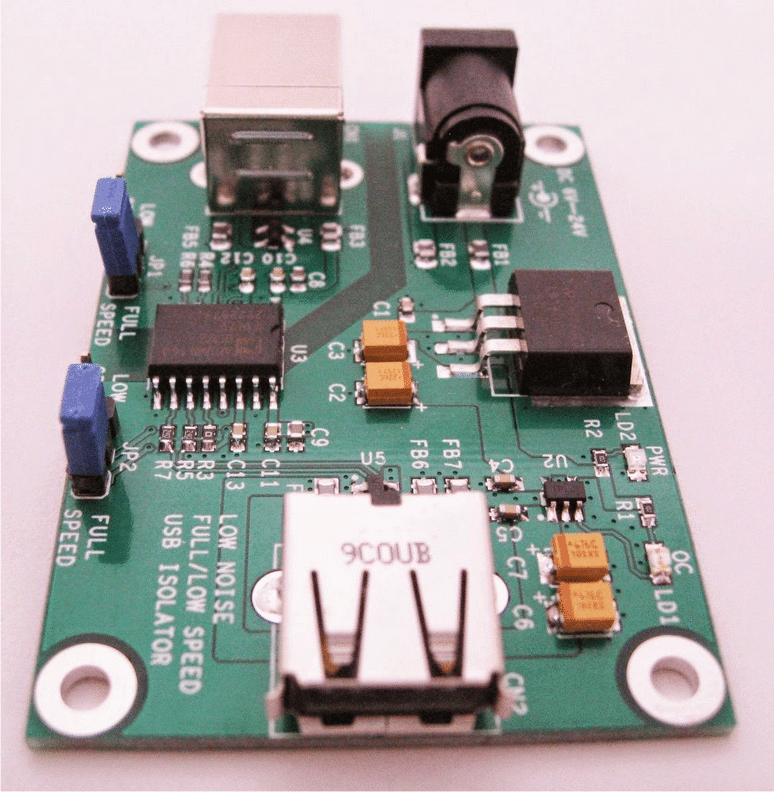
Die Schnittstelle von CAN zu USB ist ein einfaches Gerät zur Überwachung des CAN-Busses. Dieses Gerät verwendet den 32K Cortexes-M0-Mikroprozessor NUC140LC1CN. Es hat sowohl CAN- als auch USB-Peripheriegeräte.
Die Hauptmerkmale der Anbindung von CAN an USB sind:
- Es ist sehr einfach zu entwerfen
- Gut abgestimmt mit das Protokoll LAWICEL CANUSB
- Sich als Gerät wie FTDI USB ausstellen
- Es unterstützt CAN 2.0B 29-Bit- und CAN 2.0A 11-Bit-Frames
- Es besteht aus einem internen Nachrichtenpuffer (FIFO CAN)
- Es wird über den USB-Anschluss mit Strom versorgt
- Für Firmware-Updates wird ein Massenspeichergerät (Flash-residenter USB) verwendet
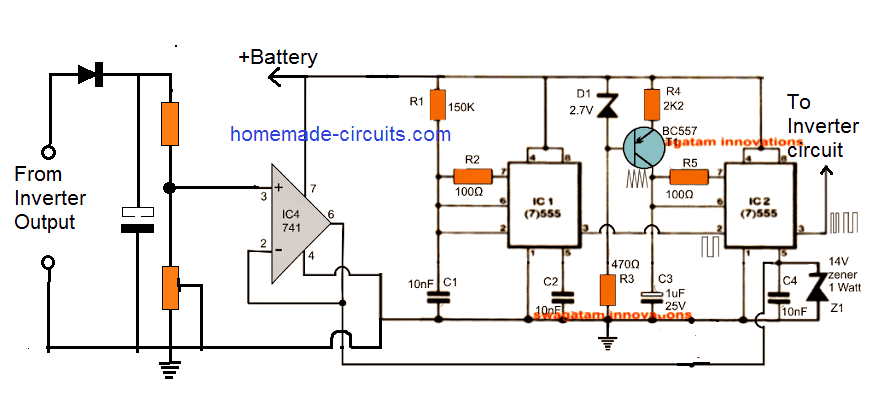
Schematische Darstellung
Die Schaltungskonfiguration der Schnittstelle von CAN zu USB ist unten dargestellt. Ein CAN-Transformator ermöglicht die Interaktion des CAN-Geräts NUC140 mit dem CAN-Bus. Der Chip TJA1051T löst den Zweck von NXP. Der Mikroprozessor NUC140 kann mit einer 5-V-Stromversorgung betrieben werden, ohne dass ein zusätzlicher 3,3-V-Spannungsregler erforderlich ist. Diese praktische Anordnung macht es einfach, die CAN-zu-USB-Schnittstelle zu implementieren.

Schematische Darstellung
Die Schaltung besteht aus drei Status-LEDs, nämlich D1, D2 und D3.
- Hier besagt der Status der D1-Diode, dass USB mit dem Host verbunden ist
- Hier sagt der Status der D2-Diode die Aktivität des CAN-Busses aus
- Die Fehler des CAN-Busses können durch eine D3-Diode angezeigt werden
Der NUC140-Mikroprozessor verfügt nicht über einen integrierten Bootloader. Die beste Programmiermethode ist nur der Nuvoton ICP-Programmierer und ARM SWD-Schnittstelle (Serial Wire Debug). Wenn der Bootloader zuvor mit einem Programm gesichert wurde, kann er ausgelöst werden. Wenn Sie den JP1 vor dem Einschalten der Schnittstelle anschließen, wird der Bootloader ausgelöst.
Bootloader
Der Flash-Speicher des Mikroprozessors NUC140LC1 ist in zwei Abschnitte unterteilt. Sie führen Benutzerprogrammcode und Bootloader aus. Die Größe des Bootloaders und des ausgeführten Benutzerprogramms beträgt 4 KB und 32 KB. Hier wird mit dem MSD-Bootloader (Mass Storage Device) von Nuvoton ein voll funktionsfähiger USB-Bootloader erstellt. Der Bootloader wird durch Anschließen eines JP1-Jumpers aktiviert. Schließlich muss im Host-Dateisystem ein Wechseldatenträger mit einer Größe von 32 KB sichtbar sein. Kopieren Sie einfach das Update von CAN auf USB-Firmware und fügen Sie es in das Bootloader-Laufwerk ein. Trennen Sie das USB-Kabel, ziehen Sie den Jumper ab und stecken Sie ihn wieder ein. Das Update der neuen Firmware sollte jetzt ausgeführt werden.

Bootloader
CAN-zu-USB-Schnittstellenprogrammierung und NuTiny-SDK-140
Programmierung des Mikroprozessors NUC140 benötigt die ICP-Programmieranwendung Nuvoton und den Nu-Link-Programmierer von Nuvoton. Hier ist das NuTiny-SDK-140 (NUC140-Demo-Board) von Digi-Key erhältlich. Es besteht aus zwei Teilen wie Nu-Link-Programmierern und dem Teil mit NUC140-Chip. Diese Platine ist sogar perforiert, um den Teil des Nu-Link zu trennen. Tatsächlich können Sie dieses Gerät ausschließlich auf der NUC140-Demokarte entwerfen. Der einzige zusätzliche CAN-Transceiver-Chip ist unerlässlich.

NUC140 Board
Hier dreht sich alles um die CAN-Schnittstelle mit USB-Includes, den CAN-Bus, die Schnittstelle zwischen CAN und USB, das schematische Diagramm, Bootloader und NUC140-Mikroprozessor. Wir hoffen, dass Sie dieses Konzept besser verstehen. Bei Fragen zu diesem Artikel geben Sie bitte Ihre wertvollen Vorschläge, indem Sie im Kommentarbereich unten einen Kommentar abgeben. Hier ist eine Frage für Sie, was sind die Anwendungen der CAN-Schnittstelle?
Bildnachweis:
- CAN zu USB-Schnittstelle saelig
- CAN BUS canbuskit
- NUC140 Instructables










{kind=link}
{kind=link}
{kind=link}