
CAN oder Controller Area Network ist eine zweidrahtige serielle Halbduplex-Hochgeschwindigkeits-Netzwerktechnologie. Es wird im Wesentlichen bei der Kommunikation zwischen verschiedenen Geräten in einem Bereich mit geringem Radius verwendet, beispielsweise in einem Automobil. Ein CAN-Protokoll ist ein CSMA-CD / ASM-Protokoll oder ein Träger, der Mehrfachzugriffs-Kollisionserkennungsschiedsverfahren auf dem Nachrichtenprioritätsprotokoll erkennt. CSMA stellt sicher, dass jeder Knoten eine bestimmte Zeit warten muss, bevor eine Nachricht gesendet wird. Die Kollisionserkennung stellt sicher, dass die Kollision vermieden wird, indem die Nachrichten basierend auf ihrer vorgeschriebenen Priorität ausgewählt werden.
Es bietet eine Signalisierungsrate von 125 kbit / s bis 1 Mbit / s. Es bietet 2048 verschiedene Nachrichtenkennungen.
Es entspricht dem ISO-11898-Standard und verwendet das 7-lagige Open Systems Interconnection-Modell.
Geschichte:
Es wurde 1982 von Robert Bosch entwickelt und 1986 offiziell von der Detroit Society of Automotive Engineers veröffentlicht. Das erste Auto mit CAN-Bus wurde 1992 von Mercedes Benz hergestellt.
ISO 11898 Architektur:

Bildquelle - Theremino
Die Schichtarchitektur besteht aus drei Schichten
- Anwendungsschicht : Es interagiert mit dem Betriebssystem oder der Anwendung des CAN-Geräts.
- Datenübertragungsebene : Es verbindet die tatsächlichen Daten mit dem Protokoll, um Daten zu senden, zu empfangen und zu validieren.
- Physikalische Schicht : Es repräsentiert die tatsächliche Hardware.
Der Standard-CAN-Frame besteht aus folgenden Bits:
 Der Standard-CAN-Frame besteht aus folgenden Bits:
Der Standard-CAN-Frame besteht aus folgenden Bits:
- SOF- Beginn von Fr. ein Ich. Die Nachricht beginnt an diesem Punkt.
- Identifizieren : Es entscheidet über die Priorität der Nachricht. Je niedriger der Binärwert, desto höher ist die Priorität. Es ist 11 Bit.
- RTR - Fernübertragungsanforderung. Es ist dominant, wenn Informationen von einem anderen Knoten benötigt werden. Jeder Knoten empfängt die Anforderung, aber nur der Knoten, dessen Kennung mit der der Nachricht übereinstimmt, ist der erforderliche Knoten. Jeder Knoten erhält auch die Antwort.z
- HIER - Einzelidentifikationserweiterung. Wenn es dominant ist, bedeutet dies, dass eine Standard-CAN-Kennung ohne Erweiterung übertragen wird.
- R0 - reserviertes Bit.
- DLC - Datenlängencode. Es definiert die Länge der gesendeten Daten. Es ist 4 Bit
- Daten - Bis zu 64 Bit Daten können übertragen werden.
- CRC - Zyklische Redundanzprüfung. Es enthält die Prüfsumme (Anzahl der übertragenen Bits) der vorhergehenden Anwendungsdaten zur Fehlererkennung.
- ACH - Bestätigen. Es ist für 2 Bit. Es ist dominant, wenn eine genaue Nachricht empfangen wird.
- EOF - Ende des Rahmens. Es markiert das Ende des Dosenrahmens und deaktiviert die Bitfüllung.
- IFS - Inter Frame Space. Es enthält die Zeit, die der Controller benötigt, um einen korrekt empfangenen Frame an seine richtige Position zu bringen.
5 Verschiedene Nachrichtentypen sind:
- Datenrahmen : Es besteht aus einem beliebigen Feld, Datenfeld, CRC-Feld und den Bestätigungsfeldern.
- Remote Frame : Es fordert die Übertragung von Daten von einem anderen Knoten an. Hier ist das RTR-Bit rezessiv.
- Fehlerrahmen : Es wird übertragen, wenn ein Fehler erkannt wird.
- Überlastungsrahmen : Es wird verwendet, um eine Verzögerung zwischen Nachrichten bereitzustellen. Es wird übertragen, wenn die Knoten zu beschäftigt werden.
- Gültiger Rahmen : Eine Nachricht ist gültig, wenn das EOF-Feld rezessiv ist. Andernfalls wird die Nachricht erneut übertragen.
CAN Physical Layer:
CAN-Bus

Bildquelle - digital.ni
Es besteht aus einer zweidrahtigen seriellen Verbindung - CAN_H und CAN_L - und ihre Spannungspegel relativ zueinander bestimmen, ob eine 1 oder 0 übertragen wird. Dies ist eine Differenzsignalisierung. Der in jeder Signalleitung fließende Strom ist gleich, aber in entgegengesetzter Richtung, was zu einem Feldauslöschungseffekt führt, der ein Schlüssel zu geringen Rauschemissionen ist. Dies gewährleistet eine ausgeglichene Differenzsignalisierung, die die Rauschkopplung reduziert und eine hohe Übertragungsrate über die Drähte ermöglicht. Normalerweise sind die Drähte Twisted-Pair-Kabel mit einer Buslänge von 40 m und maximal 30 Knoten. Es ist ein abgeschirmtes oder ungeschirmtes Kabel mit einer charakteristischen Impedanz von 120 Ohm.
CAN TRANSCEIVER:

CAN für Fahrzeuge von Hugo Provencher. Die beiden Drähte CANH und CANL haben normalerweise eine Spannung von 2,5 V, die von den beiden Transistoren und der Spannungsquelle von 2,5 V bestimmt wird. Grundsätzlich sollte der Unterschied zwischen den beiden Drähten immer 0 sein. Die Treibersteuerung bestimmt die an die CANH- und CANL-Drähte angelegte Spannung. Wenn beide Transistoren leitend sind, fällt die Spannung an der 1 abstTransistor und die Diode sind 1,5 V, wodurch der CANH-Draht bis zu 3,5 V zieht. Der Spannungsabfall über dem 2ndDer Transistor und die Diode sind 1 V, wodurch der CANL-Draht auf 1,5 V heruntergezogen wird. Die Dioden dienen dem Hochspannungsschutz. Der Empfänger ist eine Diskriminatorschaltung, die einen Ausgang von 1 ergibt, wenn die beiden Eingänge CANH und CANL gleich sind, und einen Ausgang von 0, wenn die beiden Eingänge unterschiedlich sind. Der TXD-dominante Block wird zum Erdschlussschutz verwendet, und der thermische Abschaltblock deaktiviert die Treibersteuerung, wenn die Dioden und die Transistoren überhitzt werden.
Vorteile von CAN:
- Es reduziert die Verkabelung, da es sich um eine verteilte Steuerung handelt, und dies stellt eine Verbesserung der Systemleistung sicher.
- Viele Hersteller von CAN-Chips haben die Datenverbindungsschicht und die physikalische Schicht bereitgestellt, die mit dem Chip verbunden sind, und der Softwareentwickler muss lediglich die Anwendungscodierung entwickeln.
- Es bietet die Möglichkeit, in verschiedenen elektrischen Umgebungen zu arbeiten und sorgt für eine geräuschlose Übertragung.
- Verkehrsstaus werden beseitigt, da die Nachrichten basierend auf ihrer Priorität übertragen werden und das gesamte Netzwerk die zeitlichen Einschränkungen erfüllen kann.
- Es ermöglicht eine fehlerfreie Übertragung, da jeder Knoten während der Übertragung der Nachricht nach Fehlern suchen und den Fehlerrahmen senden kann.
CAN-Arbeitsbeispiel:
Das Controller Area Network hat umfangreiche Anwendungen sowohl in der Industrie als auch in Fahrzeugen. Eine der Hauptanwendungen betrifft die Kommunikation zwischen den verschiedenen Geräten in einem Fahrzeug. Ein anderer kann unter verschiedenen Mikrocontrollern sein, beispielsweise zum Erkennen eines Passworts, die verwendet werden, um Anforderungen wie das Öffnen einer verschlossenen Tür mit einem Passwort oder das Einschalten einer Glühbirne usw. zu erfüllen.

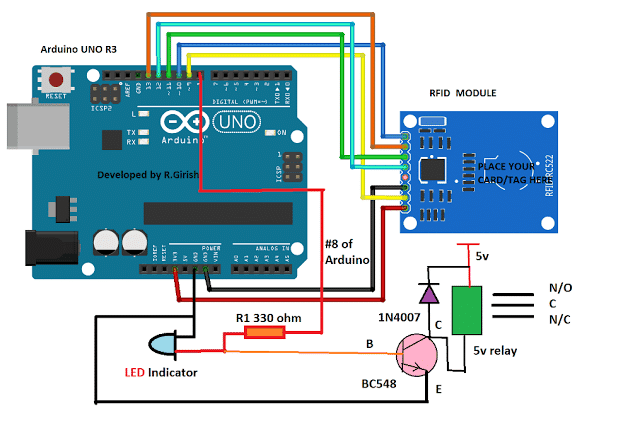
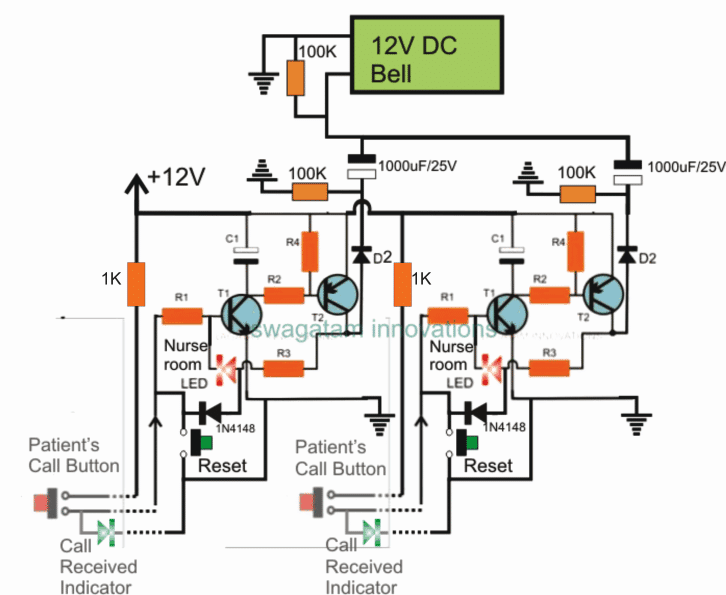
Controller Area Network Circuit
Die Basisanwendung besteht aus 3 Mikrocontrollern, die wie in einem CAN-Netzwerk über zwei Drähte miteinander kommunizieren. Die 1stDer Mikrocontroller ist mit einer Tastatur verbunden, der 2ndmit einem LCD und der dritte mit einem Summer und einem Relais, das eine Lampe betätigt. Wenn ein Passwort über die Tastatur eingegeben wird, wird die 2ndDer Mikrocontroller fungiert als Empfänger und empfängt die gesendete Nachricht Stück für Stück von der 1stSender und zeigt die Meldung auf dem LCD an. Wenn die gesamte Nachricht gesendet wird, wird die 2ndDer Mikrocontroller führt die Überprüfung durch und sendet bei falschem Passwort ein Signal an die 3rdMit diesem Signal wird der Mikrocontroller eingeschaltet, der seinerseits einen Summer sendet. Wenn das Passwort richtig ist, wird die 3rdDer Mikrocontroller schaltet das Relais ein, das wiederum die Lampe einschaltet.




![Punktkontaktdioden [Geschichte, Aufbau, Anwendungsschaltung]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)



{kind=link}
{kind=link}