Mit der Entwicklung von Technologien, insbesondere in der Robotertechnologie, dominieren Roboter in vielen Anwendungen. Einige davon sind von sehr hohem Risiko und gefährlichen Bereichen. Militär- und Schlachtfeldanwendungen setzen zunehmend Roboter für einige wichtige und komplizierte Aufgaben ein. In einem meiner Artikel habe ich den Einsatz von Robotern als Spion bei militärischen Operationen beschrieben. Was ist nun, wenn die Verteidigung von notwendig ist? das Roboterfahrzeug oder ein Angriff des Roboters? Hier besteht die Notwendigkeit eines Roboters, in den ein Angriffsmechanismus eingebettet ist. Ein solches Beispiel ist das Roboterfahrzeug mit einer LASER-Waffe.

HF-gesteuertes Roboterfahrzeug mit Laserstrahlanordnung
Ein solcher Roboter wird im Wesentlichen bei militärischen Operationen und auch von der Verkehrspolizei verwendet, um die Geschwindigkeit von sich bewegenden Fahrzeugen zu erfassen.
Bevor wir uns mit den Details zu Robotern mit Laserpistolen befassen, sollten wir uns kurz mit LASER als Waffe vertraut machen.
Ein LASER-Strahl (Lichtverstärkung durch Stimulationsemission) ist ein unidirektional stark fokussiertes Licht im Gegensatz zu dem einer einfachen Glühbirne. Es besteht aus synchronisierten Tälern und Kämmen, d. H. Die Wellen stören sich nicht gegenseitig. Dies erzeugt ein stark fokussiertes Licht mit sehr hoher Leistung in der Größenordnung von 1000 bis 1 Million Mal größer als ein typisches Glühlampenlicht. Es ist ein Gerät, das die Emission und Absorption der Photonen durch Pumpen ausreichender Energiemengen steuert. Dabei wird die Photonenquelle zu einem Lichtstrahl verstärkt. Die Wellenlänge dieser Laser wird in verschiedene Spektren wie sichtbar, infrarot und ultraviolett variiert.
Das Prinzip hinter dem LASER dreht sich um drei Dinge: Absorption, spontane Emission und stimulierte Emission. Eine ausreichende Energiemenge des Photons interagiert mit dem Atom, wodurch das Atom vom Zustand niedrigerer Energie in den Zustand höherer Energie springt. Dieses Atom fällt in den Zustand niedrigerer Energie zurück, indem es ein Photon emittiert, das als spontane Emission bezeichnet wird. Bei der stimulierten Emission wird auf künstliche Weise Energie aus dem Atom freigesetzt. Das Photon interagiert also mit dem angeregten Atom, hat die gleiche Energie und Polarisation wie das einfallende Photon.
Schauen wir uns nun die Hardware-Teile des Roboters an
- Base: Die Basis eines solchen Roboters kann ein beliebiger kubischer Körper sein, an dessen Bewegung Räder angebracht sind.
- Gleichspannungs Motor: Der Roboter besteht aus zwei Gleichstrommotoren, die von den Motortreibern angetrieben werden, und liefert dem Roboter die erforderliche Bewegung.
- Steuergerät: Die Roboterbewegung wird über ein HF-Kommunikationsmodul gesteuert. Der Sender besteht aus Drucktasten, Mikrocontrollern, einem Decoder und einem HF-Sender, während die im Roboter eingebettete Empfängereinheit aus einem Codierer und einem HF-Empfängermodul zur Steuerung des Roboters besteht Roboterbewegung .
- Eine Laserpistole: Am Roboter ist eine LASER-Pistole montiert, die die Hauptaufgabe des Roboters erfüllt.
Ein kurzer Blick in die Arbeitsweise des Roboters
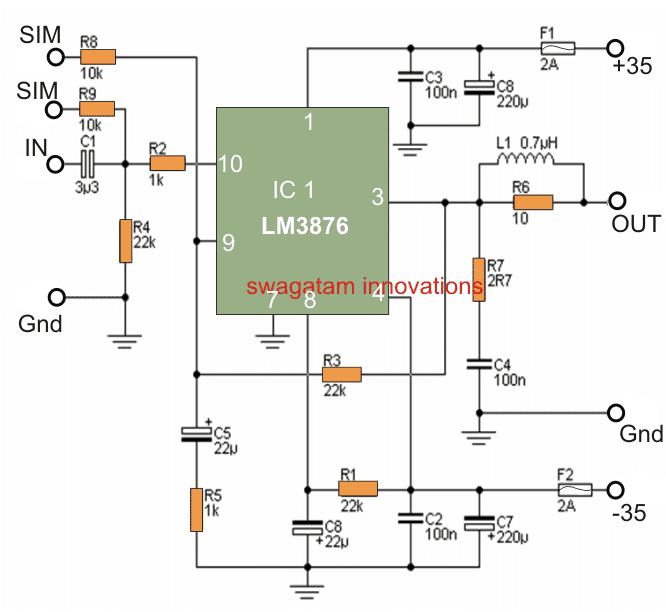
Während sich der Roboter in die gewünschte Richtung bewegt, schießt er einen starken Lichtstrahl von der LASER-Kanone ab, der entweder das Ziel schädigen oder nur einen Punkt zur Erkennung des Ziels erzeugen kann. Der LASER muss von einigen Energiequellen angetrieben werden. In einem einfachen Prototypentwurf unter Verwendung eines einfachen LASER-Stifts wird das Gerät von einem Transistor angesteuert, der als Schalter fungiert. Der Transistor empfängt das niedrige Logiksignal vom Mikrocontroller und ist ausgeschaltet, wodurch das LASER-Modul direkt an die 5-V-Stromversorgung angeschlossen wird.

Laserpistole mit Transistor als Wechselrichter
Steuerung des Roboters
Um die Roboterbewegung zu steuern, muss der Betrieb der Motoren gesteuert werden. Dies kann durch einen HF-gesteuerten Betrieb der Motortreiber erfolgen. Die Befehle werden unter Verwendung eines HF-Senders in einer Entfernung von etwa 200 Metern gesendet und vom HF-Empfänger empfangen, um die Motoren anzutreiben.
Die Sendeeinheit besteht aus mehreren Drucktasten, die als Befehlsschalter dienen, um den Roboter in jede gewünschte Richtung zu bewegen. Die Drucktasten sind mit dem Mikrocontroller verbunden, der so programmiert ist, dass er Daten in paralleler Form basierend auf der Tastatureingabe an den Encoder sendet. Der Encoder wandelt diese parallelen Daten in serielle Form um und diese seriellen Daten werden unter Verwendung des HF-Sendemoduls über eine Antenne übertragen.

Blockdiagramm mit dem Senderabschnitt
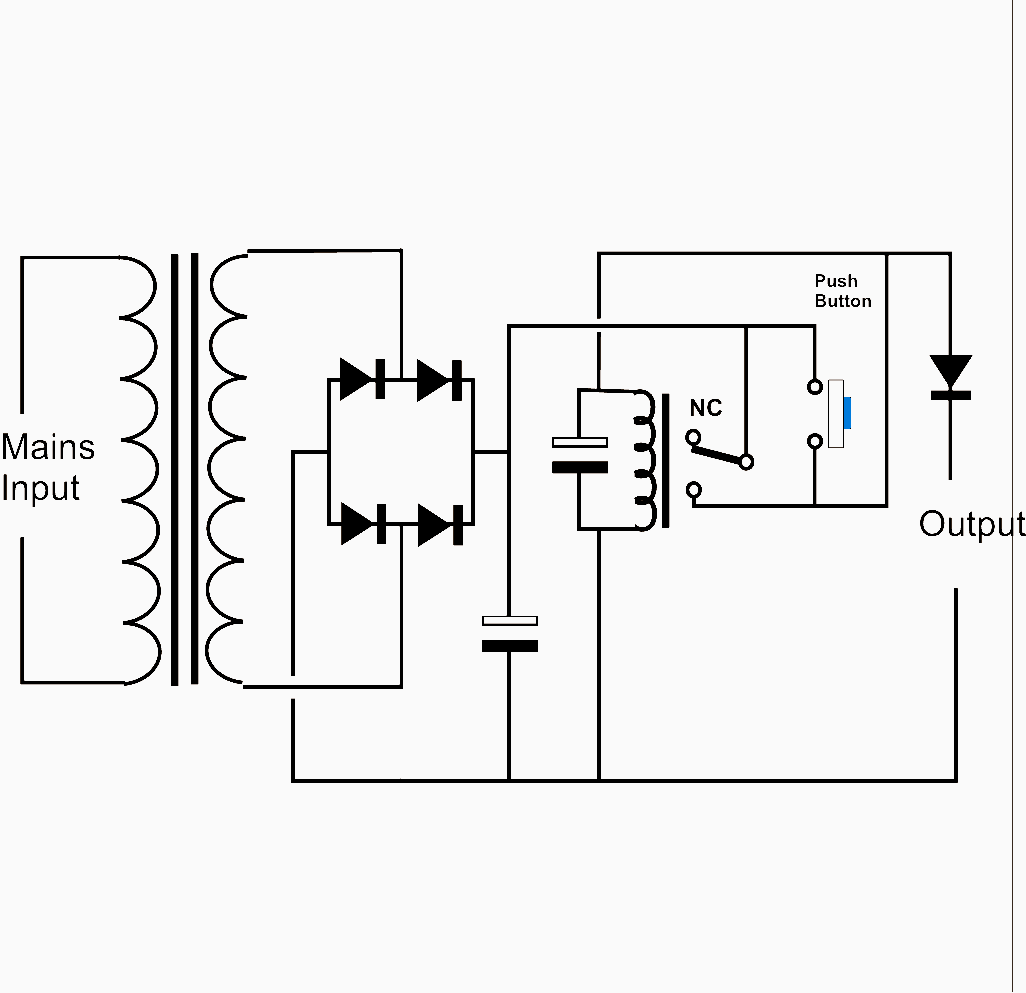
Die Empfängereinheit besteht aus einem HF-Empfängermodul, das das modulierte Signal empfängt und demoduliert. Der Decoder empfängt das demodulierte Signal in serieller Form und wandelt es in die parallele Form um. Der Mikrocontroller empfängt die Signale und steuert den Motortreiber entsprechend. Der in LM293D verwendete Motortreiber, der 2 Motoren gleichzeitig steuern kann.

Blockdiagramm mit Empfängerabschnitt
So können wir mithilfe der HF-Kommunikation den Roboter steuern.
In den obigen Beschreibungen habe ich eine kurze Vorstellung von einem einfachen Prototyp eines Roboterfahrzeugs mit einem LASER-Strahl gegeben. In realen Anwendungen werden normalerweise Fernkommunikationssysteme wie GSM oder DTMF verwendet, um den Roboter von entfernten Orten aus zu steuern.
3 Anwendungen von Roboterfahrzeugen mit Laserpistole:
- Zielerkennung : Das Roboterfahrzeug kann mit dem LASER-Strahl einen Punkt auf dem Ziel verursachen, so dass dieser gut sichtbar ist und gezielt werden kann. Ein Beispiel ist der Air Borne LASER.
- Zielzerstörung : Ein starker Laserstrahl Eine Frequenz in der Größenordnung von 95 GHz kann ein Brennen im menschlichen Körper verursachen, wenn es 1/64 in die Haut eindringtthvon einem Zoll und die Strahlenergie kann die Wassermoleküle im Körper erwärmen. Ein Beispiel ist das von den USA entwickelte Active Denial System.
- Zielbereichsfinder und Geschwindigkeitserkennung : Der LASER-Strahl des Roboterfahrzeugs kann verwendet werden, um die Reichweite des Ziels nach dem Prinzip der LASER-Lichtreflexion zu ermitteln, und auch die Geschwindigkeit des Ziels kann berechnet werden, sobald wir die Reichweite erhalten haben.
Jetzt haben wir eine kurze Vorstellung davon, wie Roboter einen Zieldetektor und einen Zerstörer verwendeten. Hat es eine andere Verwendung für die normale Öffentlichkeit als nur für das Militär? Denke und antworte.