
Normalerweise verwenden Fernsteuerungsroboter HF-Schaltungen, die die Nachteile eines begrenzten Arbeitsbereichs, einer begrenzten Steuerung und eines begrenzten Frequenzbereichs aufweisen. Um diese Nachteile zu überwinden, Handy betriebener Land Rover Roboterfahrzeug verwendet wird. Es bietet die Vorteile einer Robotersteuerung, intrusionsfreier Steuerungen und bis zu zwölf Steuerungssystemen usw.
Obwohl die Fähigkeiten und das Erscheinungsbild von eingebettete Robotik Alle Roboter sind sehr unterschiedlich und teilen die Merkmale einer beweglichen, mechanischen Struktur unter irgendeiner Kontrolle. Die Steuerung von Robotern umfasst drei verschiedene Phasen: Wahrnehmung, Verarbeitung und Aktion. Normalerweise sind die Sensoren am Roboter montiert. Die Wahrnehmung und Verarbeitung erfolgt durch den integrierten Mikrocontroller, und die Aktion wird mithilfe von Motoren ausgeführt.
Handy-betriebenes Land Rover-Roboterfahrzeug

Handy-betriebenes Land Rover-Roboterfahrzeug von Edgefxkits.com
Die Hauptabsicht dieses Projekts ist die Steuerung eines Roboterarms, der an einem Roboterfahrzeug montiert ist, mithilfe eines Mobiltelefons. Es bietet einen großen Arbeitsbereich und eine robuste Steuerung usw.
Blockdiagramm eines von einem Mobiltelefon betriebenen Land Rover-Roboterfahrzeugs:

Blockdiagramm des von einem Mobiltelefon betriebenen Land Rovers
Die Hauptbausteine sind Mikrocontroller, Mobiltelefon, DTMF-Decoder und DC-Motortreiberschaltung. Das Mobiltelefon ist der wichtigste Teil des gesamten Systems, da das gesamte System funktioniert und vom Mobiltelefon aktiviert wird. DTMF (Dual Tone Multi Frequency) empfängt das Eingangssignal vom Mobiltelefon und decodiert es und erzeugt dann einen 4-Bit-Digitalausgang des 8051 Mikrocontroller . Wenn der DTMF-Decoder einen digitalen Ausgang liefert, erzeugt er jedes Mal einen Interrupt.
Der Mikrocontroller ist das Herzstück des gesamten Systems, da er die gesamten Steuerungsaktionen ausführt. Der Mikrocontroller hängt von dem Code ab, der vom DTMF-Decoder generiert wird, um den Rover durch Drehen beider Gleichstrommotoren nach rechts oder links und vorwärts oder rückwärts zu bewegen. Der Gleichstrommotortreiber empfängt Aktivierungssignale vom Mikrocontroller in Bezug auf niedrige oder hohe Logik, verstärkt und dreht dann zwei Motoren in beide Richtungen.
Die Steuerung des Roboters umfasst hauptsächlich vier verschiedene Phasen: Wahrnehmung, Aktionsverarbeitung und Erkennung. Wenn in der Wahrnehmungsphase das an den Roboter angeschlossene Mobiltelefon einen Anruf empfängt, decodiert das Drücken der Taste auf dem Mobiltelefon den erzeugten DTMF-Ton. Dann empfängt der Decoderchip das Audiosignal vom Mobiltelefon und wandelt dann den DTMF-Ton in einen Binärcode um, der dann dem Mikrocontroller zugeführt wird. In diesem Projekt wird ein MT88710-IC als DTMF-Decoder verwendet. In der Verarbeitungsstufe verarbeitet der Mikrocontroller den Binärcode, der vom DTMF-Decoder empfangen wird. Das Der Mikrocontroller ist in „C“ vorprogrammiert. um diese spezielle Aufgabe gemäß den Eingangsbits auszuführen.
Auf der Aktionsstufe hängt die Drehung der Motoren von der Eingabe des Mikrocontrollers ab. Für den Landrover werden zwei Gleichstrommotoren mit jeweils 30 U / min verwendet, die vom Motortreiber-IC angetrieben werden. Bei Erkennung der Bühne und zur Hinderniserkennung wird ein Infrarot-Sender und -Empfänger werden zusammen mit dem Summer verwendet. Wenn das Hindernis vor dem Roboter steht, sendet der IR-Sender die IR-Strahlen auf das Objekt, dann reflektiert das Objekt die IR-Strahlen zum IR-Empfänger. Der IR-Empfänger empfängt dann die IR-Strahlen, um den Summer zu aktivieren.
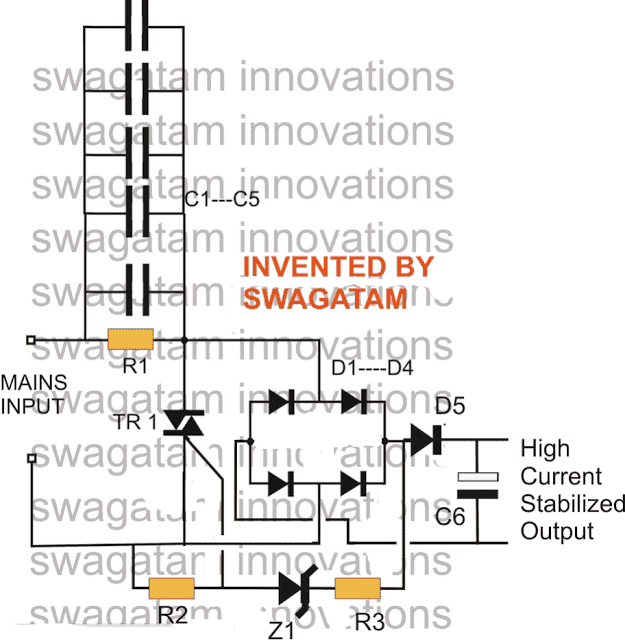
Schaltplan eines von einem Mobiltelefon betriebenen Landrover-Roboterfahrzeugs:
Die Hauptkomponenten dieses von Mobiltelefonen betriebenen Roboter-Landrovers sind Mikrocontroller, Motortreiber und DTMF-Decoder. In diesem Projekt wird ein DTMF-Decoder der MT8870-Serie verwendet, der digitale Zähltechniken verwendet, um die 16 DTMF-Tonpaare in einem 4-Bit-Code-Ausgang zu erfassen. Die eingebaute Wähltonschaltung eliminiert das Vorfiltern. Wenn an Pin2 ein Eingangssignal gegeben wird, wird die Eingangskonfiguration als wirksam erkannt. Das 4-Bit-Decodierungssignal des DTMF-Tons wird über den Ausgang von Pin 14 an Pin11 übertragen. Diese Pins sind mit den Mikrocontroller-Pins Pao, Pa1, Pa2 und Pa3 verbunden. Der Ausgang des Mikrocontrollers von den Port-Pins PD0 bis PD3 und PD7 wird den Eingängen IN1, IN4 zugeführt und ermöglicht den Pins EN1, EN2 des Motortreiber-L293D-IC treiben die beiden Gleichstrommotoren an .

Schaltplan des von einem Mobiltelefon betriebenen Land Rovers
In dieser Schaltung wird der S1-Schalter zum manuellen Zurücksetzen verwendet. Der Ausgang des Mikrocontrollers reicht nicht aus, um die Gleichstrommotoren anzutreiben, daher sind Stromtreiber für die Motordrehung erforderlich. Der Motortreiber L293D ist für bidirektionale Antriebsströme von bis zu 600 mA bei Spannungen von 4,5 V bis 36 V ausgelegt einfacher, die Gleichstrommotoren anzutreiben. Der Motortreiber L293D besteht aus vier Treibern. Die Pins IN1 bis IN4 & OUT1 und OUT4 sind die Eingangs- und Ausgangspins des Treibers 1 bis Treiber 4. Die Treiber 1,2,3 und 4 werden durch den Freigabepin1 (EN1) und den Pin 9 (EN2) aktiviert. Wenn der Freigabeeingang EN1 (Pin1) hoch ist, werden die Treiber 1 und 2 aktiviert. Ebenso aktiviert der Freigabeeingang EN2 (Pin9) die Treiber 3.
Vorteile und Nachteile:
Zu den Vorteilen eines von Mobiltelefonen betriebenen Roboter-Landrovers gehören ein Bereitstellungs- und Überwachungssystem für die drahtlose Steuerung, eine auf 3G-Technologie basierende Fahrzeugnavigation und eine unbegrenzte Reichweite basierend auf dem Netzwerk des Mobiltelefons. Der Nachteil ist: Die Kosten, da die Handy-Abrechnung hoch ist mobile Batterien entladen : Das mit den Batterien verbundene Entladeproblem, da die Batterie aufgrund der schnellen Entladung aufgrund einer hohen Anpassungsfähigkeit aufgeladen wird. Das System ist nicht an alle Mobiltelefone anpassbar, aber diejenigen mit angeschlossenem Headset können nur verwendet werden.
Daher ist dieses von Mobiltelefonen betriebene Roboterprojekt in militärischen Anwendungen sehr nützlich, um Militärfahrzeuge mithilfe eines Mobiltelefons zu steuern. In Zukunft können wir die Position von Feinden erkennen, indem wir a arrangieren drahtlose Kamera zum Land Rover Roboterfahrzeug. Dieses Projekt kann auch für Akademiker hilfreich sein, da die Schüler verschiedene in diesem Projekt vorgeschlagene Terminologien und Prinzipien lernen können. Dieses Projekt wird den Schülern helfen, ihre innovativen Gedanken und Ideen einzubringen Robotikprojekte entwickeln .
Bildnachweis:
- Handy betrieben Land Rover von Santoshbanisetty
- Schaltplan des Handy Rover von Ingenieursgarage






{kind=link}