Ein Bestückungsroboter ist derjenige, mit dem ein Objekt aufgenommen und an der gewünschten Stelle platziert wird. Es kann sich um einen zylindrischen Roboter handeln, der eine Bewegung in horizontaler, vertikaler und rotatorischer Achse ermöglicht, einen kugelförmigen Roboter, der zwei rotierende und eine lineare Bewegung bereitstellt, einen Gelenkroboter oder einen Scara-Roboter (feste Roboter mit 3 vertikalen Achsen).
Vorteile
Bevor wir fortfahren, lassen Sie uns einige Gründe sehen, warum Pick-and-Place-Roboter bevorzugt werden:
- Sie sind schneller und können die Arbeit im Vergleich zu ihren menschlichen Kollegen in Sekunden erledigen.
- Sie sind flexibel und haben das passende Design.
- Sie sind genau.
- Sie erhöhen die Sicherheit des Arbeitsumfelds und werden eigentlich nie müde.
Teile eines Pick N Place Roboters

Wählen Sie N Place Robot
Lassen Sie uns sehen, woraus der Bestückungsroboter tatsächlich besteht:
- Zu Rover : Es ist der Hauptkörper des Roboters, der aus mehreren starren Körpern wie einem Zylinder oder einer Kugel, Gelenken und Gliedern besteht. Es ist auch als Manipulator bekannt.
- Endeffektor : Es ist der Körper, der mit dem letzten Gelenk des Rovers verbunden ist und zum Greifen oder Handhaben von Gegenständen verwendet wird. Es kann eine Analogie zum Arm eines Menschen sein.
- Aktoren : Sie sind die Fahrer des Roboters. Es betätigt tatsächlich den Roboter. Dies kann ein beliebiger Motor wie ein Servomotor, ein Schrittmotor oder ein Pneumatik- oder Hydraulikzylinder sein.
- Sensoren: Sie werden verwendet, um sowohl den internen als auch den externen Zustand zu erfassen und sicherzustellen, dass der Roboter insgesamt reibungslos funktioniert. Sensoren umfassen Berührungssensoren, IR-Sensoren usw.
- Regler : Es wird verwendet, um die Aktuatoren basierend auf der Sensorrückmeldung zu steuern und somit die Bewegung jedes einzelnen Gelenks und schließlich die Bewegung des Endeffektors zu steuern.
Arbeiten mit einem einfachen Pick N Place-Roboter:
Die Grundfunktion von a Roboter auswählen und platzieren wird durch seine Gelenke gemacht. Gelenke sind analog zu menschlichen Gelenken und werden verwendet, um die zwei aufeinanderfolgenden starren Körper im Roboter zu verbinden. Sie können Drehgelenk oder Lineargelenk sein. Um einem Glied eines Roboters ein Gelenk hinzuzufügen, müssen wir die Freiheitsgrade und Bewegungsgrade für diesen Körperteil kennen. Freiheitsgrade implementieren die lineare und rotatorische Bewegung des Körpers und Bewegungsgrade implizieren die Anzahl der Achsen, die der Körper bewegen kann.

Ein einfacher Pick N Place Roboter
Ein einfacher Bestückungsroboter besteht aus zwei starren Körpern auf einer beweglichen Basis, die mit einem Drehgelenk verbunden sind. Ein Drehgelenk ist ein Gelenk, das eine Drehung um 360 Grad um eine der Achsen ermöglicht.
- Der Boden oder die Basis ist mit Rädern befestigt, die eine lineare Bewegung ermöglichen.
- Die 1stDer starre Körper ist fixiert und trägt den zweiten starren Körper, an dem der Endeffektor vorgesehen ist.
- Die 2ndDer starre Körper ist in allen 3 Achsen beweglich und hat 3 Freiheitsgrade. Es ist mit dem 1 verbundenstKörper mit einem Drehgelenk.
- Der Endeffektor sollte alle 6 Freiheitsgrade aufnehmen, um alle Seiten des Bauteils zu erreichen und eine beliebige Höhe einzunehmen.
Insgesamt funktioniert der grundlegende Bestückungsroboter wie folgt:
- Die Räder unter der Basis helfen, den Roboter an den gewünschten Ort zu bewegen.
- Der starre Körper, der den Endeffektor trägt, biegt oder richtet sich auf, um die Position zu erreichen, an der sich das Objekt befindet.
- Der Endeffektor nimmt das Objekt mit einem starken Griff auf und platziert es an der gewünschten Position.
Nachdem wir eine kurze Vorstellung vom Bestückungsroboter haben, ist die grundlegende Frage, wie er tatsächlich gesteuert wird.
Ein einfacher Bestückungsroboter kann durch Steuern der Bewegung seines Endeffektors gesteuert werden. Die Bewegung kann eine hydraulische Bewegung sein, d. H. Eine unter Druck stehende Hydraulikflüssigkeit, um den Roboter anzutreiben, oder eine pneumatische Bewegung, d. H. Eine Druckluft, um eine mechanische Bewegung zu verursachen. Am effektivsten ist es jedoch, Motoren zu verwenden, um die erforderliche Bewegung bereitzustellen. Die Motoren müssen gesteuert werden, um dem Roboter und dem Endeffektor die erforderliche Bewegung zu ermöglichen.
Arbeitsbeispiel für die Steuerung eines Pick-N-Place-Roboters
Wie wäre es mit der Steuerung des Roboters mit nur wenigen Tasten auf der Tastatur? Ja, es ist möglich! Durch einfaches Drücken der erforderlichen Taste können wir dem Roboter den Befehl senden, ihn in eine beliebige Richtung zu bewegen, um unsere Aufgabe zu erfüllen. Darüber hinaus kann dies durch einfache drahtlose Kommunikation erreicht werden.
Mal sehen, wie das tatsächlich funktioniert:
Der Senderteil besteht aus der Tastatur, die mit dem Mikrocontroller verbunden ist. Jede Tastennummer im Dezimalformat wird vom Mikrocontroller in eine 4-stellige Binärzahl konvertiert, und der parallele Ausgang an einem seiner Ports wird an den Encoder angelegt. Der Encoder wandelt diese parallelen Daten in serielle Daten um und diese werden dem Sender zugeführt, der mit einer Antenne ausgestattet ist, um die seriellen Daten zu übertragen.

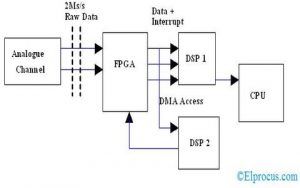
Blockdiagramm mit dem Sender eines Pick-N-Place-Roboters
Die Empfängerseite besteht aus einem Decoder, der mit dem Mikrocontroller verbunden ist. Der Decoder konvertiert den empfangenen Befehl im seriellen Format in die parallele Form und gibt diese Daten an den Mikrocontroller weiter. Basierend auf diesem Befehl sendet der Mikrocontroller die entsprechenden Eingangssignale an die Motortreiber, um die jeweiligen Motoren anzutreiben.

Blockdiagramm mit dem Empfänger eines Pick N Place-Roboters
Das System besteht aus zwei Motoren zur Bewegung des gesamten Roboters und zwei weiteren Motoren zur Bereitstellung der Armbewegung. Der Endeffektor oder der Greifer muss gesteuert werden, um einen angemessenen Druck auf das Objekt auszuüben, damit es effektiv gehandhabt werden kann weicher Griff . Dies wird durch die Steuerung der Armmotoren durch ordnungsgemäße Steuerung sichergestellt. Der Ausgang der Armmotoren ist mit einem 10 Ohm / 2 W-Widerstand verbunden, und zum Zeitpunkt der Überlastung des Motors oder des verriegelten Zustands wird am Widerstand eine hohe Spannung aufgebaut, die einen logisch hohen Pegel am Ausgang des Optoisolators und des Interrupts verursacht Der Pin des Mikrocontrollers, der über einen pnp-Transistor mit dem Optoisolatorausgang verbunden ist, erhält ein logisch niedriges Signal, das alle anderen Operationen des Greifers anhält.
So können wir durch einfache HF-Kommunikation tatsächlich einen Bestückungsroboter steuern.
Praktische Anwendungen von Bestückungsrobotern:
- Verteidigungsanwendungen : Es kann zur Überwachung und auch zum Aufnehmen schädlicher Gegenstände wie Bomben und zur sicheren Verbreitung verwendet werden.
- Industrielle Anwendungen : Diese Roboter werden in der Fertigung verwendet, um die erforderlichen Teile aufzunehmen und in die richtige Position zu bringen, um die Maschinenbefestigung zu vervollständigen. Es kann auch verwendet werden, um Gegenstände auf das Förderband zu legen und defekte Produkte vom Förderband aufzunehmen.
- Medizinische Anwendungen : Diese Roboter können bei verschiedenen chirurgischen Eingriffen eingesetzt werden, z. B. bei Gelenkersatzoperationen, orthopädischen und internen Operationen. Es führt die Operationen mit größerer Präzision und Genauigkeit aus.
Neben diesen Anwendungen können diese Roboter auch in verschiedenen anderen für die Menschheit geeigneten Anwendungen eingesetzt werden.
Jetzt bleibt die Frage: Wie weit ist der Tag, an dem Roboter den Menschen den Weg vollständig erleichtern werden?