In diesem Projekt werden wir 12 V Gleichstrom auf einen Gleichstromwert zwischen 2 und 11 Volt senken. Die Schaltung, die die Gleichspannung verringert, ist als Abwärtswandler bekannt. Die benötigte Ausgangsspannung oder Abwärtsspannung wird mit einem an Arduino angeschlossenen Potentiometer gesteuert.
Von Ankit Negi
EINFÜHRUNG IN KONVERTER:
Grundsätzlich gibt es zwei Arten von Konvertern:
1. Abwärtswandler
2. Aufwärtswandler
Beide Wandler ändern die Eingangsspannung je nach Anforderung. Sie ähneln a Transformator mit einem Hauptunterschied. Während der Transformator eine Wechselspannung erhöht / verringert, erhöhen Gleichstromwandler die Gleichspannung. Hauptkomponenten beider Konverter sind:
A. MOSFET
B. INDUKTOR
C. Kondensator
BUCK CONVERTER: Wie der Name schon sagt, bedeutet Buck, die Eingangsspannung zu senken. Abwärtswandler gibt uns die Spannung kleiner als die Eingangsgleichspannung mit hoher Stromkapazität. Es ist eine direkte Umwandlung.
BOOST CONVERTER: Wie der Name schon sagt, bedeutet Boost, die Eingangsspannung zu erhöhen.
Der Aufwärtswandler gibt uns die Gleichspannung mehr als die Gleichspannung am Eingang. Es ist auch eine direkte Konvertierung.
** In diesem Projekt werden wir eine Abwärtswandlerschaltung bauen, um 12 V Gleichstrom unter Verwendung von Arduino als PWM-Quelle herunterzufahren.
ÄNDERN DER PWM-FREQUENZ AN ARDUINO-PINS:
PWM-Pins von Arduino UNO sind 3, 5, 6, 9, 10 und 11.
Um PWM auszuführen, wird folgender Befehl verwendet:
analogWrite (PWM PIN NO, PWM VALUE)
und die PWM-Frequenz für diese Pins sind:
Für Arduino Pins 9, 10, 11 und 3 ---- 500Hz
Für Arduino Pins 5 und 6 ---- 1kHz
Diese Frequenzen eignen sich gut für allgemeine Zwecke wie das Ausbleichen einer LED. Aber für Schaltung wie Buck- oder Aufwärtswandler Man braucht eine Hochfrequenz-PWM-Quelle (im Bereich von zehn KHz), weil der MOSFET eine Hochfrequenz für ein perfektes Schalten benötigt und auch ein Hochfrequenzeingang den Wert oder die Größe von Schaltungskomponenten wie Induktor und Kondensator verringert. Daher benötigen wir für dieses Projekt eine Hochfrequenz-PWM-Quelle.
Gut ist, dass wir die PWM-Frequenz der PWM-Pins von Arduino mit einfachem Code ändern können:
FÜR ARDUINO UNO:
Verfügbare PWM-Frequenz für D3 & D11:
// TCCR2B = TCCR2B & B11111000 | B00000001 // für PWM-Frequenz von 31372,55 Hz
// TCCR2B = TCCR2B & B11111000 | B00000010 // für PWM-Frequenz von 3921,16 Hz
// TCCR2B = TCCR2B & B11111000 | B00000011 // für PWM-Frequenz von 980,39 Hz
TCCR2B = TCCR2B & B11111000 | B00000100 // für eine PWM-Frequenz von 490,20 Hz (The DEFAULT)
// TCCR2B = TCCR2B & B11111000 | B00000101 // für PWM-Frequenz von 245,10 Hz
// TCCR2B = TCCR2B & B11111000 | B00000110 // für PWM-Frequenz von 122,55 Hz
// TCCR2B = TCCR2B & B11111000 | B00000111 // für eine PWM-Frequenz von 30,64 Hz
Verfügbare PWM-Frequenz für D5 & D6:
// TCCR0B = TCCR0B & B11111000 | B00000001 // für eine PWM-Frequenz von 62500,00 Hz
// TCCR0B = TCCR0B & B11111000 | B00000010 // für PWM-Frequenz von 7812,50 Hz
TCCR0B = TCCR0B & B11111000 | B00000011 // für eine PWM-Frequenz von 976,56 Hz (The DEFAULT)
// TCCR0B = TCCR0B & B11111000 | B00000100 // für PWM-Frequenz von 244,14 Hz
// TCCR0B = TCCR0B & B11111000 | B00000101 // für PWM-Frequenz von 61,04 Hz
Verfügbare PWM-Frequenz für D9 & D10:
// TCCR1B = TCCR1B & B11111000 | B00000001 // Timer 1 Divisor für PWM-Frequenz von 31372,55 Hz auf 1 setzen
// TCCR1B = TCCR1B & B11111000 | B00000010 // für PWM-Frequenz von 3921,16 Hz
TCCR1B = TCCR1B & B11111000 | B00000011 // für eine PWM-Frequenz von 490,20 Hz (The DEFAULT)
// TCCR1B = TCCR1B & B11111000 | B00000100 // für PWM-Frequenz von 122,55 Hz
// TCCR1B = TCCR1B & B11111000 | B00000101 // für eine PWM-Frequenz von 30,64 Hz
** Wir werden Pin Nr. verwenden. 6 für PWM daher der Code:
// TCCR0B = TCCR0B & B11111000 | B00000001 // für eine PWM-Frequenz von 62,5 kHz
KOMPONENTENLISTE:
1. ARDUINO UNO
2. INDUKTOR (100Uh)
3. SCHOTTKY DIODE
4. Kondensator (100uf)
5. IRF540N
6. POTENTIOMETER
7. 10k, 100 Ohm Widerstand
8. LADEN (Motor in diesem Fall)
9,12 V BATTERIE
SCHALTPLAN


Stellen Sie die Verbindungen wie im Schaltplan gezeigt her.
1. Verbinden Sie die Endanschlüsse des Potentiometers mit dem 5-V-Pin bzw. dem Erdungsstift des Arduino UNO, während der Wischeranschluss mit dem analogen Pin A1 verbunden ist.
2. Verbinden Sie den PWM-Pin 6 des Arduino mit der Basis des Mosfets.
3. Pluspol der Batterie zum Entleeren des Mosfets und Minuspol zum p-Anschluss der Schottky-Diode.
4. Verbinden Sie die Last (Motor) vom p-Anschluss der Schottky-Diode in Reihe mit dem Induktor mit dem Quellenanschluss des Mosfets.
5. Verbinden Sie nun den n-Anschluss der Schottky-Diode mit dem Source-Anschluss des Mosfet.
6. Schließen Sie den 47uf-Kondensator an den Motor an.
7. Verbinden Sie zuletzt den Erdungsstift des Arduino mit dem Source-Anschluss des Mosfet.
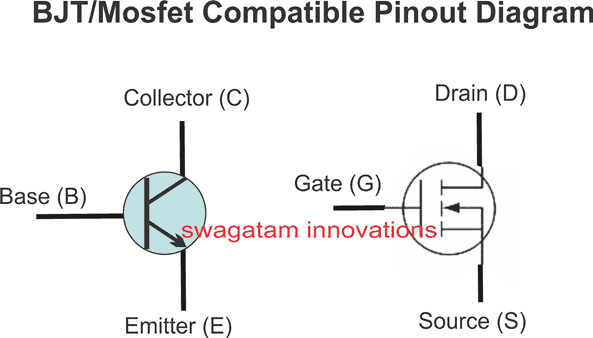
Zweck des Mosfets:
Mosfet wird verwendet, um die Eingangsspannung auf hohe Frequenz umzuschalten und einen hohen Strom bei geringerer Wärmeableitung bereitzustellen.
Zweck von Arduino:
Für hohe Schaltgeschwindigkeit des Mosfets (bei einer Frequenz von ca. 65 kHz)
Zweck des Induktors:
Wenn dieser Stromkreis ohne Anschluss eines Induktors betrieben wird, besteht eine hohe Wahrscheinlichkeit, dass der Mosfet durch Hochspannungsspitzen am Anschluss des Mosfets beschädigt wird.
Um zu verhindern, dass Mosfet diese Hochspannungsspitzen erzeugt, wird es wie in der Abbildung gezeigt angeschlossen, da es bei eingeschaltetem Mosfet Energie speichert und bei ausgeschaltetem Mosfet diese gespeicherte Energie an den Motor abgibt.
Zweck der Schottky-Diode:
Angenommen, die Schottky-Diode ist nicht im Stromkreis angeschlossen. In diesem Fall gibt der Induktor beim Ausschalten des Mosfets seine Energie an die Last oder den Motor ab, was sich nur sehr geringfügig auf die Last auswirkt, da eine unvollständige Schleife für den Stromfluss vorhanden ist. Somit vervollständigt die Schottky-Diode die Schleife, damit Strom fließt. Jetzt ist hier keine normale Diode angeschlossen, da die Schottky-Diode einen geringen Durchlassspannungsabfall aufweist. Zweck der LED:um die Unterspannung über der Last anzuzeigen.
Zweck des Potentiometers:
Potentiometer gibt Arduino einen Analogwert (basierend auf der Position des Wischeranschlusses), gemäß dem die PWM-Spannung vom Gate-Anschluss des Mosfet vom PWM-Pin 6 von Arduino empfangen wird. Dieser Wert steuert letztendlich die Ausgangsspannung über der Last.
Warum ist der Widerstand zwischen Gate und Source angeschlossen?
Schon geringe Geräuschentwicklung kann den Mosfet einschalten. Daher a Widerstand herunterziehen ist zwischen Gate und Masse, d. h. Quelle, verbunden.
Programmcode
Burn this code to arduino:
int m // initialize variable m
int n // initialize variable n
void setup()
B00000001 // for PWM frequency of 62.5 KHz on pin 6( explained under code section)
Serial.begin(9600) // begin serial communication
void loop()
{
m= analogRead(A1) // read voltage value from pin A1 at which pot. wiper terminal is connected
n= map(m,0,1023,0,255) // map this ip value betwenn 0 and 255
analogWrite(6,n) // write mapped value on pin 6
Serial.print(' PWM Value ')
Serial.println(n)
}
CODE ERKLÄRUNG
1. Die Variable x ist der Spannungswert, der von Pin A1 empfangen wird, an dem der Wischeranschluss des Topfes angeschlossen ist.
2. Der Variablen y wird der zugeordnete Wert zugewiesen, der zwischen 0 und 255 liegt.
3. ** Wie bereits im obigen Abschnitt für Schaltungen wie Buck- oder Boost-Wandler erläutert, benötigt man eine Hochfrequenz-PWM-Quelle (im Bereich von zehn KHz), da MOSFETs Hochfrequenzen für ein perfektes Schalten benötigen und der Hochfrequenzeingang den Wert oder die Größe verringert von Schaltungskomponenten wie Induktor und Kondensator.
Daher werden wir diesen einfachen Code verwenden, um eine PWM-Spannung von ca. 65 kHz Frequenz: TCCR0B = TCCR0B & B11111000 | B00000001 // für eine PWM-Frequenz von 62,5 kHz an Pin 6
Wie es funktioniert:
Da das Potentiometer Arduino einen Analogwert gibt (basierend auf der Position des Wischeranschlusses), bestimmt dies den PWM-Spannungswert, der vom Gate-Anschluss des Mosfet vom PWM-Pin 6 von Arduino empfangen wird.
Und dieser Wert steuert letztendlich die Ausgangsspannung über der Last.
Wenn der Mosfet eingeschaltet ist, speichert der Induktor Energie und wenn er abschaltet, wird diese gespeicherte Energie an die Last abgegeben, d. H. In diesem Fall an den Motor. Und da dieser Prozess mit sehr hoher Frequenz stattfindet, wird die Gleichspannung am Motor verringert, was von der Position des Wischeranschlusses abhängt, da Mosfet ein spannungsabhängiges Gerät ist.Prototypbilder:



 Videoclip der oben erläuterten Buck Converter-Schaltung mit Arduino
Videoclip der oben erläuterten Buck Converter-Schaltung mit Arduino
Zurück: Einfacher digitaler Wasserdurchflussmesserkreislauf mit Arduino Weiter: 4 einfache Näherungssensorschaltungen - Verwenden von IC LM358, IC LM567, IC 555