In diesem Beitrag lernen wir eine Rückwärts-Vorwärts-Timer-Schaltung zum Betreiben eines Inkubator-Motormechanismus mit einem bevorzugten Satz von Bewegungen. Die Idee wurde von Herrn Anwar angefordert
Technische Spezifikationen
Ich komme aus Indonesien ..... Ich brauche Schaltpläne für Inkubator-Timer mit Motor mit hohem Drehmoment (DC-Motor-Fenster im Auto). Ich versuche, einen Gleichstrommotor dazu zu bringen, in zwei Richtungen zu laufen, bis er die Endposition erreicht, dann zu stoppen und die Polarität zu wechseln, damit er in die andere Richtung läuft, wenn die Stromversorgung wieder hergestellt wird. Dann machen Sie dasselbe am anderen Ende.
1. Der Timer schaltet sich 1 Minute lang ein. (7:00 bis 07:00 Uhr)
2. Der Motor läuft in eine Richtung, bis er die Stoppposition erreicht, z. B. 30 Sekunden.
3. Die Stromversorgung des Motors wird ausgeschaltet, wenn er die Stoppposition erreicht und 1 Minute lang verzögert. Timer zum Beenden / Ausschalten der Hauptstromversorgung. kehrt auch die Polarität um, so dass.
4. Wenn der Haupttimer das nächste Mal eingeschaltet wird (10: 00-10: 01), dosiert er dasselbe in umgekehrter Richtung und wiederholt sich kontinuierlich
5. 12 VDC Motorumkehr (nur zwei Kabel von Motor + und -)
6. Benötigen Sie eine LED-Anzeige für den Rev / Fwd-Motor
Können Sie mir helfen, Sir?
Vielen Dank im Voraus für jede Hilfe.
Dies ist ein wichtiges Heimprojekt, das 100% zuverlässig sein muss.
Das Design

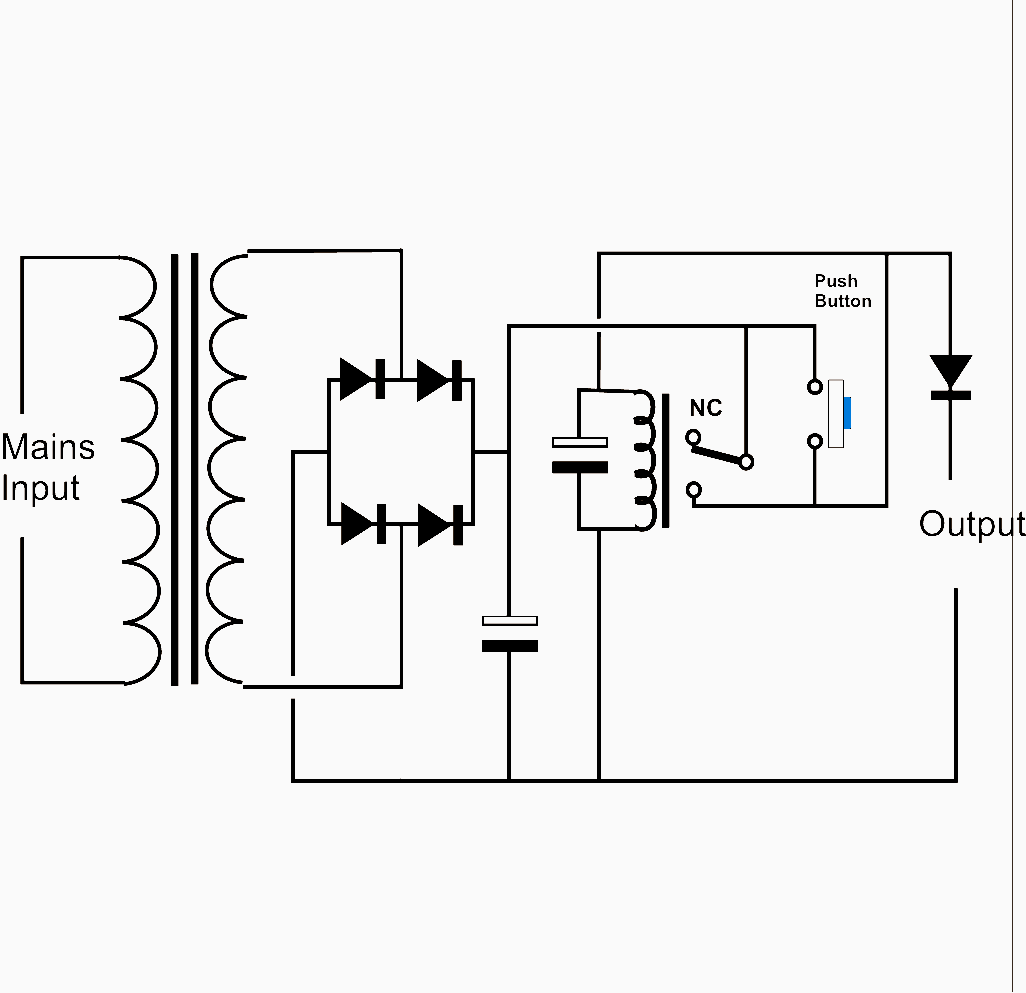
In der obigen Abbildung können wir einen Entwurf zur Implementierung der vorgeschlagenen Rückwärtsbewegung eines Inkubatormotors nach einem vorgegebenen Zeitintervall visualisieren.
Zum Zeitpunkt des Einschaltens haben wir das folgende Szenario:
Es kann angenommen werden, dass sich der Magnetschalter für 'Einstellen' in einem deaktivierten Zustand befindet oder gedrückt ist, während sich der Motor oder der vorgesehene Inkubatormechanismus in seiner Nullstartposition befindet.
Bitte beachten Sie, dass die Schalter 'Set' / 'Reset' vorzugsweise mit magnetischen Reed-Schaltern ausgeführt werden sollten.
Wenn die Stromversorgung eingeschaltet ist, wird der IC 4060 über C2 zurückgesetzt, so dass er den Zählvorgang von Null aus initiiert, und Pin3 wird als Nulllogik dargestellt.
Diese anfängliche Nulllogik wird über C3 der Basis von T1 zugeführt, wodurch T3 und das zugehörige Relais sofort zur Aktivierung gezwungen werden. R7 stellt dabei sicher, dass T1 / T3 in diesem Modus zwischengespeichert wird.
Das DPDT-Relais betätigt an diesem Punkt an seinen N / O-Kontakten den Motor und den Mechanismus in Richtung einer angenommenen Vorwärtsbewegung.
Sobald sich der Motor zu bewegen beginnt, wird die Einstelltaste losgelassen, so dass T4 und das obere SPDT die Möglichkeit erhalten, zu betätigen, wobei das SPDT-Relais eine N / O-Positionsumschaltung erreicht, wodurch die N / C-Kontakte des DPDT in einen Standby-Modus versetzt werden liefern..
Der Motor und / oder der Mechanismus bewegen sich weiter, bis er die 'Rücksetz' -Position erreicht hat, wodurch T2 die T1 / T4-Verriegelung aktiviert und aufbricht.
Bei ausgeschaltetem T4 ändert das DPDT-Relais seine Position von N / O auf N / C und bietet eine entgegengesetzte (Rückwärts-) Bewegung zum Motormechanismus.
Der Inkubatormotormechanismus dreht nun seine Richtung um und leitet eine Rückwärtsbewegung ein, bis er den Sollwert erreicht hat, der den Basisantrieb von T4 schnell ausschaltet, der SPDT die Schneidleistung des DPDT ausschaltet und der gesamte Mechanismus zum Stillstand kommt .
In der Zwischenzeit zählt der IC 4060 weiter, bis er erneut eine Nulllogik erzeugt hat, nachdem er an seinem Pin3 eine hohe Logik durchlaufen hat (durch Entladen von C3).
Der Zyklus wird erneut gestartet und wiederholt den oben erläuterten Vorgang.
Zurück: Blinken einer LED mit Arduino - Vollständiges Tutorial Weiter: Hochleistungs-Überspannungsschutz für industrielle Netze untersucht