
Der WSG-DSA ist ein Greiferfinger, der die taktile Erfassung für hochauflösendes Profilfeedback beim Greifen integriert. Für Erfassungszwecke wird ein intelligenter taktiler Wandler DSA9205i verwendet. Es passt auf die Basisbacken des WSG und ist über den integrierten Sensoranschluss in den Basisbacken direkt mit dem Greifer-Controller verbunden, sodass keine externen Komponenten und Kabel erforderlich sind, um ein taktiles Gerät für Ihre Handhabungsanwendungen zu verwenden. Diese Arten von Fingersensoren werden von der WSG automatisch erkannt und parametrisiert. Das Druckprofil kann über eine leistungsstarke Skriptschnittstelle von der Innenseite des Greiferreglers aus verwendet werden. Dieser Artikel beschreibt Arten von taktilen Sensoren und ihre Funktionsweise .
Was ist ein taktiler Sensor?
Ein taktiler Sensor ist ein Gerät. Es misst die kommenden Informationen als Reaktion auf die physische Interaktion mit der Umgebung. Der Tastsinn beim Menschen wird im Allgemeinen modelliert, d. H. Der Hautsinn und der kinästhetische Sinn. Hautberührung hat die Fähigkeit, die Reize zu erfassen, die aus der mechanischen Stimulation, dem Schmerz und der Temperatur resultieren. Die kinästhetische Berührung empfängt Sensoreingaben von den Rezeptoren in den Muskeln, Sehnen und Gelenken.

Taktiler Sensor
Arten von taktilen Sensoren
Es gibt verschiedene Arten von taktilen Sensoren, die unten angegeben sind
- Kraft- / Drehmomentsensor
- Dynamischer Sensor
- Wärmesensor
Kraft- / Drehmomentsensor
Kraft- / Drehmomentsensoren werden in Kombination mit einem taktilen Array verwendet, um die Informationen für die Kraftsteuerung bereitzustellen. Diese Arten von Sensoren kann die Last überall wie am distalen Glied eines Manipulators und in Einschränkungen als Hautsensor erfassen. Der Hautsensor bietet im Allgemeinen eine genauere Kraftmessung bei höheren Bandbreiten. Wenn die Manipulatorverbindung allgemein definiert ist und der Signalpunktkontakt angenommen wird, kann der Kraft- / Drehmomentsensor Informationen über den Kontaktort von Kraft und Momenten liefern - dies wird als intrinsische taktile Erfassung bezeichnet. Das Bild des Drehmomentsensors ist unten dargestellt.

Kraft- oder Drehmomentsensor
Dynamischer Sensor
Dynamische Sensoren sind kleiner Beschleunigungsmesser an den Fingerstreifen oder an der Haut des Roboterfingers. Die allgemeine Funktion wie Pacinian Corpuscles beim Menschen und gleich große Felder haben jeweils einen oder zwei Skins Beschleunigungsmesser für den gesamten Finger ausreichend. Diese Sensoren erfassen effektiv das Herstellen und Unterbrechen von Kontakten, die Vibrationen, die mit dem Gleiten über strukturierte Oberflächen verbunden sind.

Dynamischer Sensor
Ein Spannungsratensensor ist der zweite Typ eines dynamischen taktilen Sensors. Wenn die Fingerspitze mit einer Geschwindigkeit von einigen cm / s insgesamt kleinen Unebenheiten oder Gruben auf einer Oberfläche gleitet, wurden die vorübergehenden Veränderungen in der Haut wichtig. Ein Piezoelektrikum Polymer wie PVDF erzeugt eine Ladung als Reaktion auf eine Beschädigung, die angewendet werden kann, um einen Strom zu erzeugen, der direkt proportional zum Änderungsbereich ist.
Wärmesensor
Wärmesensoren sind wichtig für die Fähigkeit des Menschen, die Materialien der hergestellten Objekte zu identifizieren, aber einige werden auch in der Robotik verwendet. Bei der thermischen Erfassung werden Wärmegradienten in der Haut erfasst, die sowohl der Temperatur als auch der Wärmeleitfähigkeit eines Objekts entsprechen. Roboter-Wärmesensoren sind in Kombination mit an den Peltier-Übergängen beteiligt die Thermistoren .

Wärmesensor
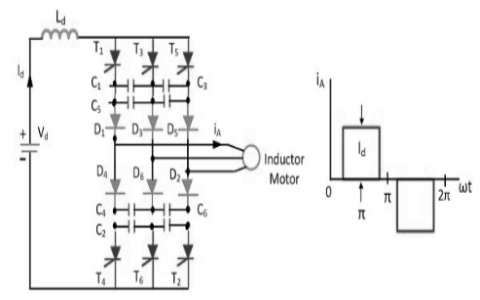
Funktionsprinzip und Schaltplan des Tastsensors
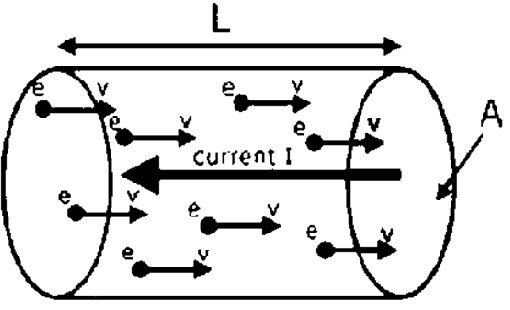
Die taktilen Sensoren wurden entwickelt, um taktile Erfassungsfähigkeiten für teleoperative Manipulatoren und intelligente Roboter bereitzustellen. Taktile Sensoren können eine Normalkraft identifizieren, die auf die taktilen Pixel ausgeübt wird, um die Kraftsteuerung und die taktilen Bilder zu hypnotisieren und eine Objekterkennung zu erzeugen. Um taktile Bilder und Normalkräfte zu erhalten, ist die Tangentialinformation jedoch entscheidend für die Kraftsteuerung und die Gleitverhütung, was für den Erfolg der Aufgabe faszinierend ist. Daher sind dreidimensionale taktile Sensoren erforderlich.

Schaltplan des taktilen Sensors
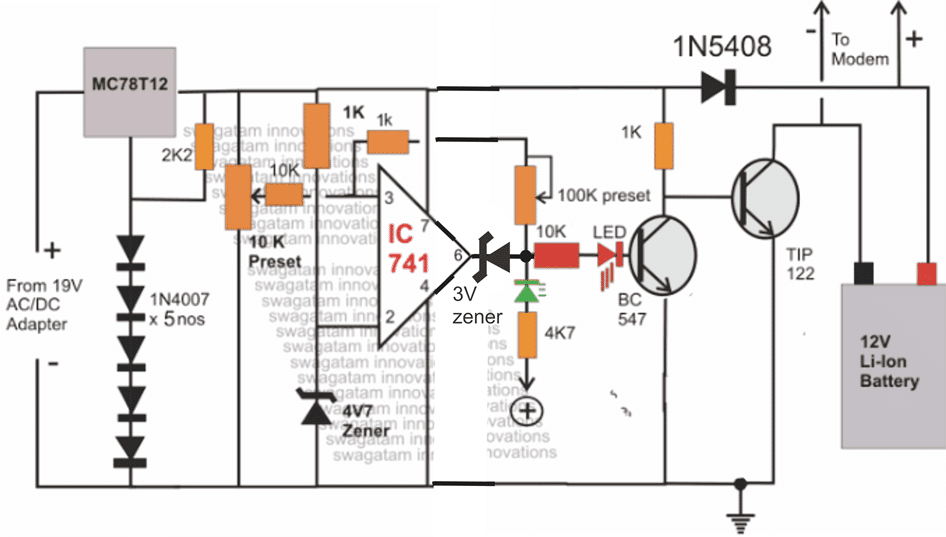
Es gibt mehrere dreidimensionale taktile Sensoren, die unter Verwendung der piezoresistiven, kapazitiven und optionalen Sensorelemente entwickelt wurden, und diese taktilen Sensoren werden von der hergestellt MEMS-Technologie . Die integrierten Sensorelemente und die Vorverarbeitungsschaltungen dienen der Kompaktheit, diese sind jedoch für die meisten Anwendungen zu schwach und leicht zu brechen, und beispielsweise beträgt der Kraftbereich eines Tastsensors nur 0,01 N w4x und die anderen Tastsensoren nicht bereitgestellt durch die MEMS-Technologie. Das folgende Schaltbild zeigt eine taktile Sensorschaltung.
Der taktile Sensor in der Robotik
Der taktile Sensor, der in den NASA-Robotern verwendet wird, ist unten angegeben
- Eines der Beispiele, die in direktem Zusammenhang mit der Erforschung des Planeten stehen.
- Die NASA nutzt diese Sensoren auf der internationalen Raumstation, um Menschen bei der Reparatur / Wartung der Umwelt zu helfen
- Die NASA hat viele taktile Sensoren in der Robotik ausprobiert, die sich in der Anfangsphase befinden. Sie haben verwendet Kraftmesswiderstand und jetzt werden Quantentunnel-Verbundwerkstoffe verwendet
- Mehrere Lasttasten und Zellen werden zur Praxis gemacht, taktile Sensoren zu entwickeln, die von einem Industrieroboter hergestellt werden
Taktile Sensoranwendungen
Berühren Sensoranwendungen werden in verwendet
- Robotik
- Computerhardware
- Sicherheitssystem
- Touchscreen Geräte auf dem Handy
- Computing
Vorteile des taktilen Sensors
Die Vorteile des taktilen Sensors sind nachstehend aufgeführt:
- Sie bieten einfach zu bedienende taktile Sensorlösungen
- Der taktile Sensor hat keine externen Komponenten und Kabel
- Kompakte Extraktion
- Verifizierte taktile Sensortechnologie aus der Robotik.
Hier geht es um das Funktionsprinzip und die Anwendungen des taktilen Sensors. Wir hoffen, dass die angegebenen Informationen hilfreich sind, um gute Informationen und ein besseres Verständnis des Projekts zu vermitteln. Darüber hinaus, wenn Sie Fragen zu diesem Konzept auf der haben elektrische und elektronische Projekte können Sie im folgenden Abschnitt kommentieren. Hier ist eine Frage an Sie: Welche Funktionen haben taktile Sensoren?
Bildnachweis:
- Taktiler Sensor Platz
- Kraft- / Drehmomentsensor Wandlertechniken
- Dynamischer Sensor Nonius
- Wärmesensor Bilder-Amazon









{kind=link}
{kind=link}
{kind=link}